
#include <collide_util.h>
Public Member Functions | |
| CollideGrid3d () | |
| CollideGrid3d (const vector3d &Norigin, const vector3d &desiredSize) | |
| void | pup (PUP::er &p) |
| void | init (const vector3d &Norigin, const vector3d &desiredSize) |
| real | world2grid (int axis, real x) const |
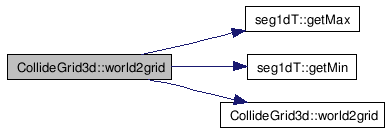
| iSeg1d | world2grid (int axis, const rSeg1d &s) const |
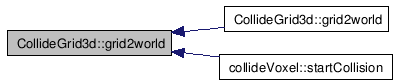
| real | grid2world (int axis, real val) const |
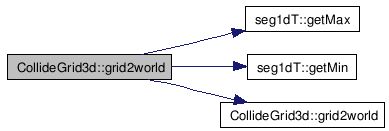
| rSeg1d | grid2world (int axis, rSeg1d src) const |
| void | print (const CollideLoc3d &g) |
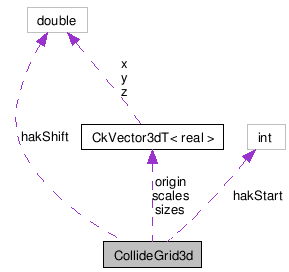
Private Attributes | |
| vector3d | origin |
| vector3d | scales |
| vector3d | sizes |
| double | hakShift [3] |
| int | hakStart [3] |
Definition at line 95 of file collide_util.h.
| CollideGrid3d::CollideGrid3d | ( | ) | [inline] |
Definition at line 102 of file collide_util.h.
Definition at line 103 of file collide_util.h.
References init().

| void CollideGrid3d::pup | ( | PUP::er & | p | ) |
Definition at line 34 of file collide_util.C.
References float, hakShift, hakStart, origin, PUP::s, scales, sizes, and testMapping().
Referenced by CollideGrid3d().


Definition at line 111 of file collide_util.h.
References origin, and scales.
Referenced by CollisionAggregator::aggregate(), testMapping(), and world2grid().

Definition at line 114 of file collide_util.h.
References fh, float, seg1dT< T >::getMax(), seg1dT< T >::getMin(), hakShift, int, and world2grid().
Definition at line 128 of file collide_util.h.
References hakStart, origin, and sizes.
Referenced by grid2world(), and collideVoxel::startCollision().
Definition at line 136 of file collide_util.h.
References seg1dT< T >::getMax(), seg1dT< T >::getMin(), and grid2world().
| void CollideGrid3d::print | ( | const CollideLoc3d & | g | ) |
Definition at line 65 of file collide_util.C.
References hakStart, CollideLoc3d::x, CollideLoc3d::y, and CollideLoc3d::z.
vector3d CollideGrid3d::origin [private] |
Definition at line 96 of file collide_util.h.
Referenced by grid2world(), init(), pup(), and world2grid().
vector3d CollideGrid3d::scales [private] |
vector3d CollideGrid3d::sizes [private] |
double CollideGrid3d::hakShift[3] [private] |
int CollideGrid3d::hakStart[3] [private] |
Definition at line 99 of file collide_util.h.
Referenced by grid2world(), init(), print(), and pup().
 1.5.5
1.5.5