
#include <liveViz0.h>
Public Types | |
| enum | pixel_t { pix_greyscale = 0, pix_color = 1, pix_float = 2 } |
Public Member Functions | |
| liveVizConfig () | |
| liveVizConfig (bool isColor, bool serverPush_) | |
| 2D constructors: | |
| liveVizConfig (pixel_t pix, bool serverPush_) | |
| liveVizConfig (bool isColor, bool serverPush_, const CkBbox3d &box_) | |
| 3D constructors: | |
| liveVizConfig (pixel_t pix, bool serverPush_, const CkBbox3d &box_) | |
| void | moreVerbose (void) |
| Increment the verbosity level on the server. | |
| bool | getColor (void) const |
| Extract configuration information:. | |
| int | getBytesPerPixel (void) const |
| Return the number of bytes per pixel used during assembly. | |
| int | getNetworkBytesPerPixel (void) const |
| Return the number of bytes per pixel used on the wire. | |
| bool | getPush (void) const |
| bool | get3d (void) const |
| const CkBbox3d & | getBox (void) const |
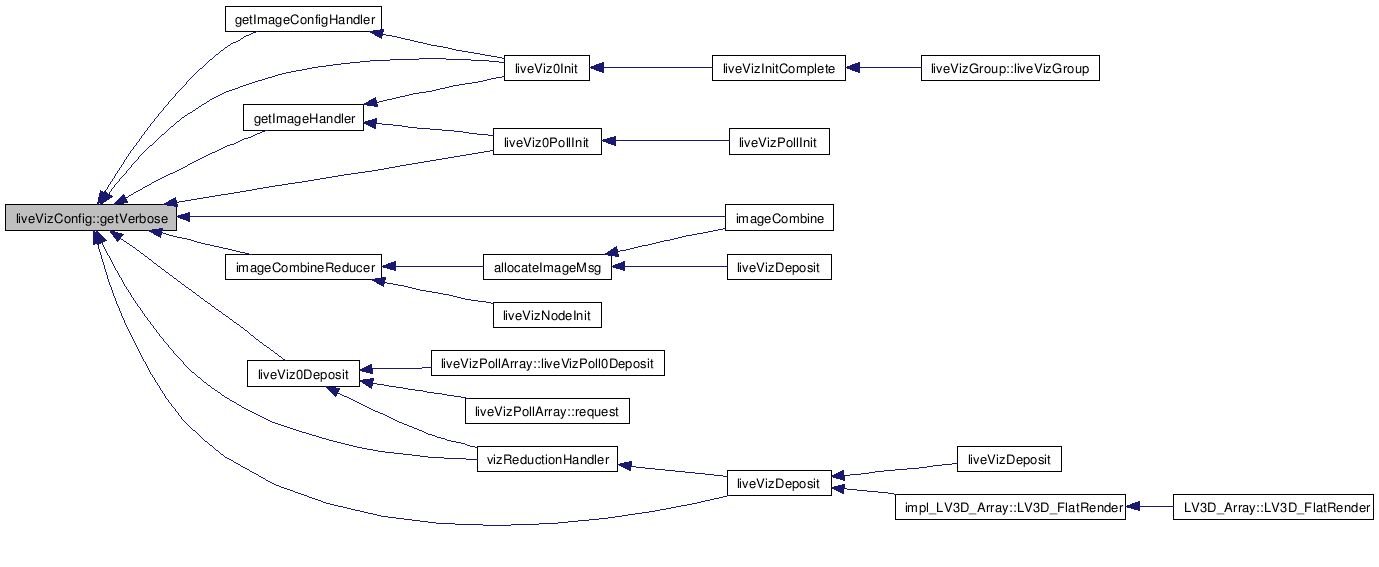
| bool | getVerbose (int thanLevel) const |
| void | pupNetwork (PUP::er &p) |
Private Member Functions | |
| void | init (pixel_t pix, bool serverPush=false) |
Private Attributes | |
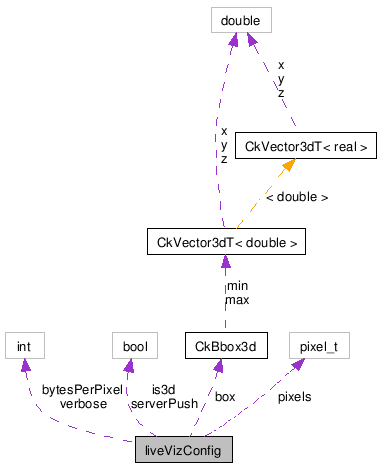
| pixel_t | pixels |
| int | bytesPerPixel |
| bool | serverPush |
| If true, the server produces images regardless of whether the client asks for them; this is true for animating and batch-mode images. | |
| bool | is3d |
| If true, show 3d camera motion tools. | |
| CkBbox3d | box |
| If 3d, the viewed object's bounding box, universe coords. | |
| int | verbose |
| If nonzero, printf status info; higher numbers give more prints. | |
Definition at line 62 of file liveViz0.h.
| liveVizConfig::liveVizConfig | ( | ) | [inline] |
Definition at line 74 of file liveViz0.h.
References init(), and pix_greyscale.
2D constructors:
Definition at line 77 of file liveViz0.h.
References init(), pix_color, and pix_greyscale.

Definition at line 80 of file liveViz0.h.
References init().

3D constructors:
Definition at line 85 of file liveViz0.h.
References box, init(), is3d, pix_color, and pix_greyscale.

Definition at line 89 of file liveViz0.h.
References box, init(), and is3d.
| void liveVizConfig::moreVerbose | ( | void | ) | [inline] |
Increment the verbosity level on the server.
Definition at line 95 of file liveViz0.h.
References verbose.
| bool liveVizConfig::getColor | ( | void | ) | const [inline] |
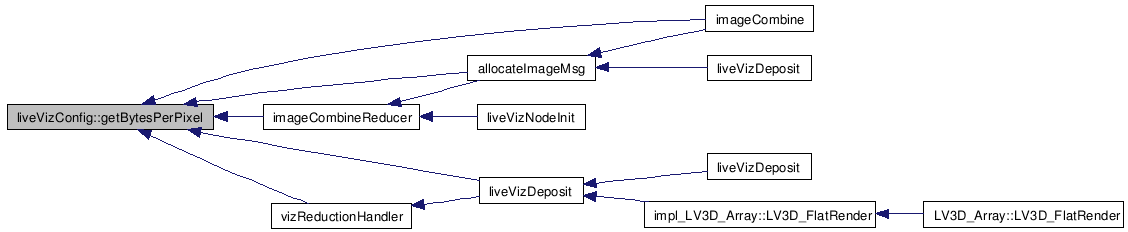
| int liveVizConfig::getBytesPerPixel | ( | void | ) | const [inline] |
Return the number of bytes per pixel used during assembly.
Definition at line 100 of file liveViz0.h.
References bytesPerPixel.
Referenced by allocateImageMsg(), imageCombine(), imageCombineReducer(), liveVizDeposit(), and vizReductionHandler().
| int liveVizConfig::getNetworkBytesPerPixel | ( | void | ) | const [inline] |
Return the number of bytes per pixel used on the wire.
Definition at line 102 of file liveViz0.h.
References pix_greyscale, and pixels.
Referenced by liveViz0Deposit(), and vizReductionHandler().

| bool liveVizConfig::getPush | ( | void | ) | const [inline] |
| bool liveVizConfig::get3d | ( | void | ) | const [inline] |
| const CkBbox3d& liveVizConfig::getBox | ( | void | ) | const [inline] |
Definition at line 106 of file liveViz0.h.
References verbose.
Referenced by getImageConfigHandler(), getImageHandler(), imageCombine(), imageCombineReducer(), liveViz0Deposit(), liveViz0Init(), liveViz0PollInit(), liveVizDeposit(), and vizReductionHandler().
| void liveVizConfig::pupNetwork | ( | PUP::er & | p | ) |
Definition at line 36 of file liveViz0.C.
References box, bytesPerPixel, is3d, CkBbox3d::max, CkBbox3d::min, pix_color, pix_greyscale, pixels, serverPush, and version.
Referenced by getImageConfigHandler(), and liveVizGroup::pup().

Definition at line 20 of file liveViz0.C.
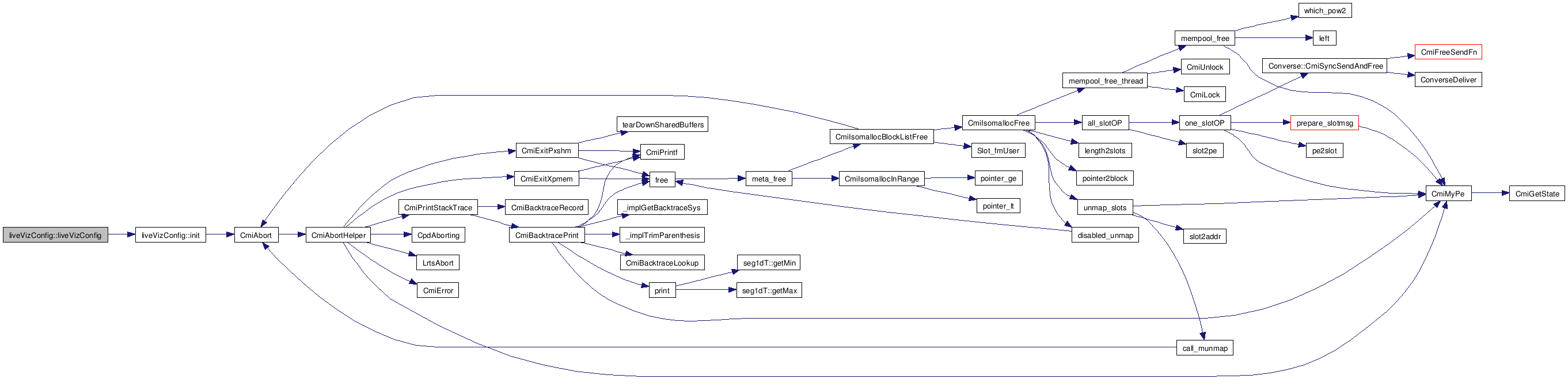
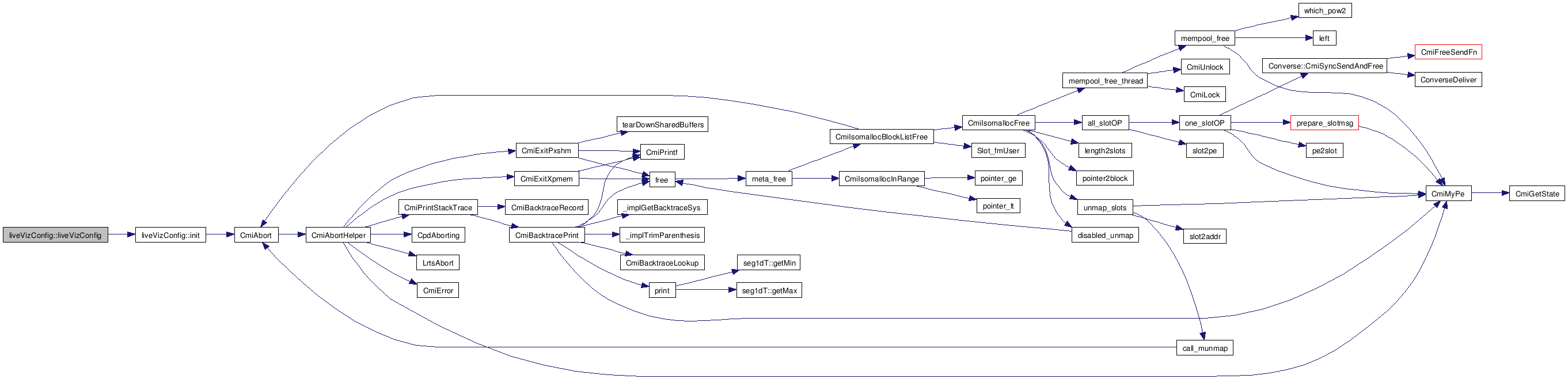
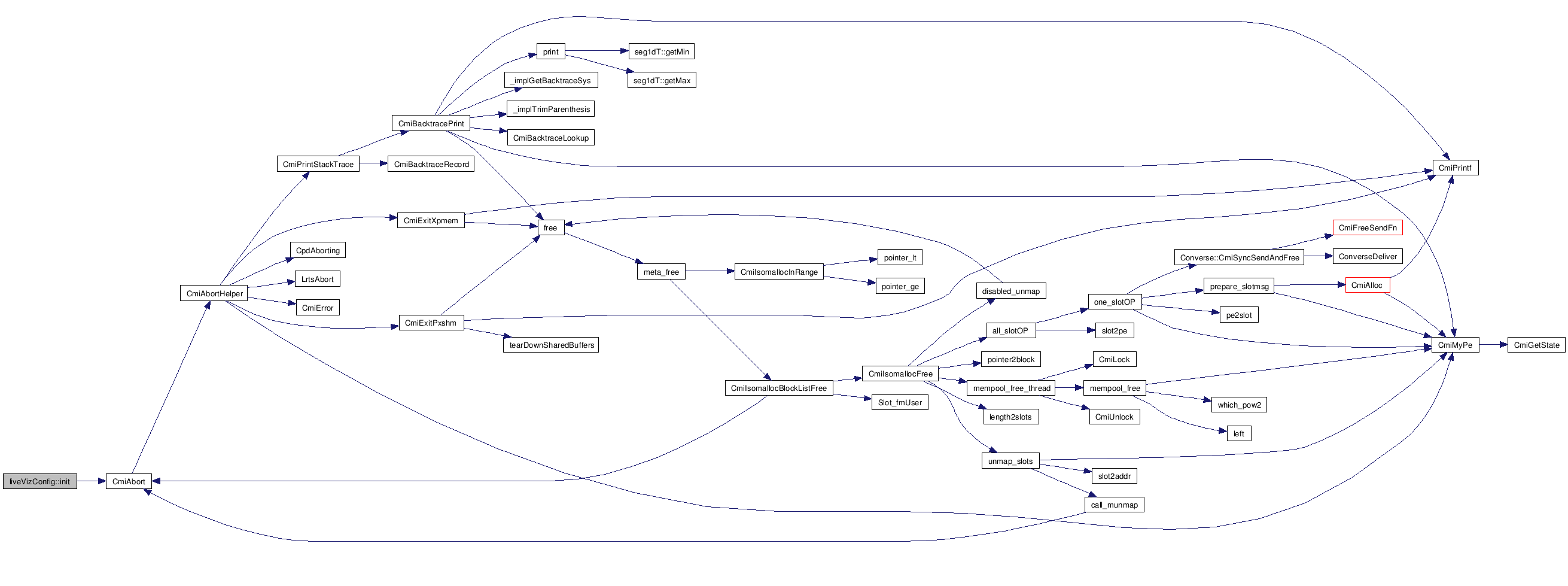
References bytesPerPixel, CmiAbort(), is3d, pix_color, pix_float, pix_greyscale, pixels, serverPush, and verbose.
Referenced by liveVizConfig().

pixel_t liveVizConfig::pixels [private] |
Definition at line 111 of file liveViz0.h.
Referenced by getColor(), getNetworkBytesPerPixel(), init(), and pupNetwork().
int liveVizConfig::bytesPerPixel [private] |
Definition at line 112 of file liveViz0.h.
Referenced by getBytesPerPixel(), init(), and pupNetwork().
bool liveVizConfig::serverPush [private] |
If true, the server produces images regardless of whether the client asks for them; this is true for animating and batch-mode images.
If false, the server will respond to client requests; this is true for viz-on-demand services. The client repeatedly asks for an image if this is set; if not set it only asks when the client's window size or viewpoint changes.
Definition at line 122 of file liveViz0.h.
Referenced by getPush(), init(), and pupNetwork().
bool liveVizConfig::is3d [private] |
If true, show 3d camera motion tools.
Definition at line 124 of file liveViz0.h.
Referenced by get3d(), init(), liveVizConfig(), and pupNetwork().
CkBbox3d liveVizConfig::box [private] |
If 3d, the viewed object's bounding box, universe coords.
Definition at line 125 of file liveViz0.h.
Referenced by getBox(), liveVizConfig(), and pupNetwork().
int liveVizConfig::verbose [private] |
If nonzero, printf status info; higher numbers give more prints.
Definition at line 127 of file liveViz0.h.
Referenced by getVerbose(), init(), and moreVerbose().
 1.5.5
1.5.5