
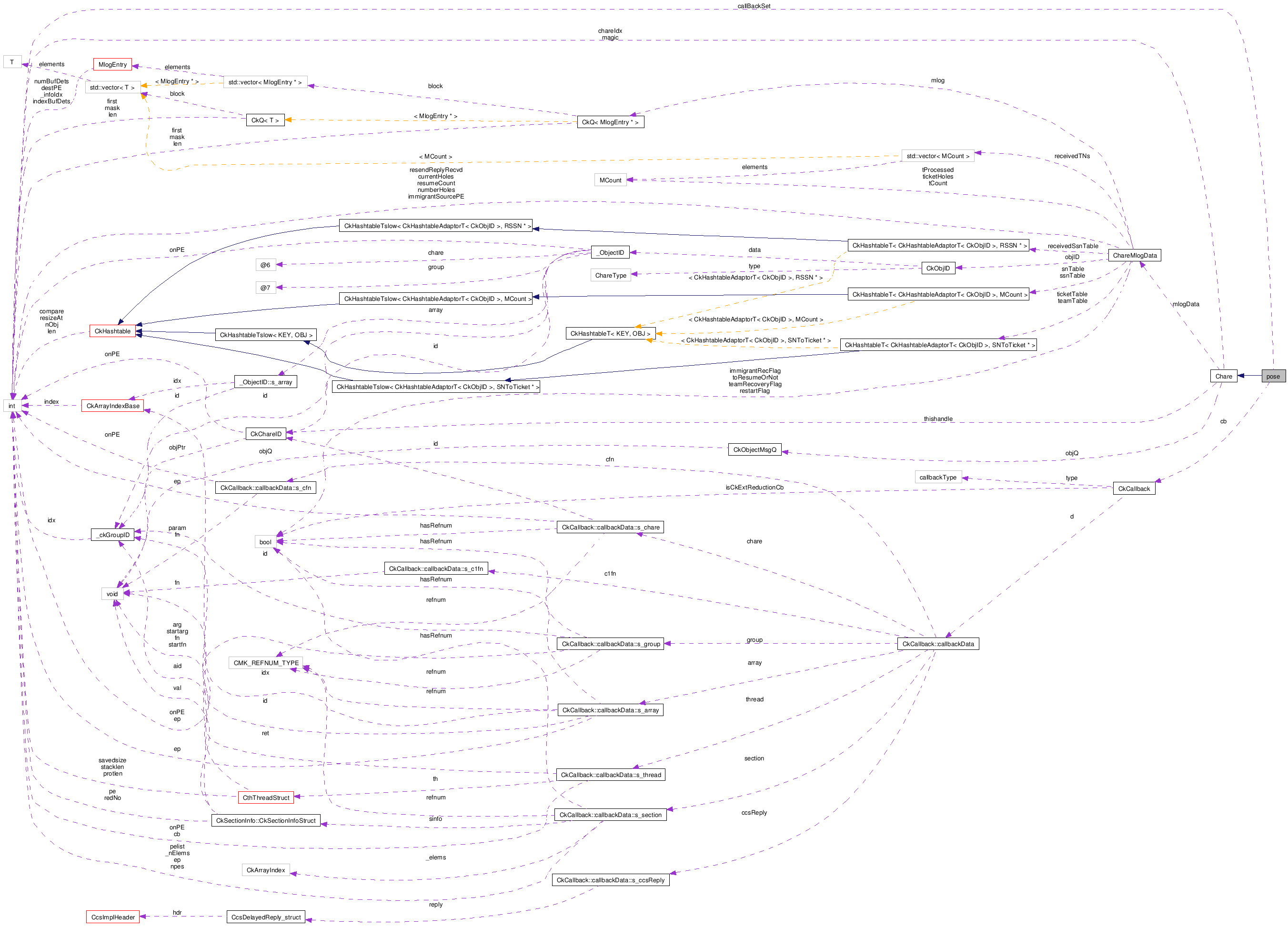
#include <pose.h>
Public Member Functions | |
| pose (void) | |
| Basic Constructor. | |
| pose (CkMigrateMessage *) | |
| Migration constructor. | |
| void | pup (PUP::er &p) |
| PUP routine. | |
| void | registerCallBack (callBack *) |
| Register the callback with POSE. | |
| void | stop () |
| Stop the simulation. | |
| void | prepExit () |
| Exit the simulation. | |
| void | exit () |
| Exit the simulation. | |
Private Attributes | |
| CkCallback | cb |
| A callback to execute on termination. | |
| int | callBackSet |
| Flag to indicate if a callback will be used. | |
Definition at line 179 of file pose.h.
| pose::pose | ( | void | ) | [inline] |
Basic Constructor.
Definition at line 189 of file pose.h.
References Converse::CkMyPe().

| pose::pose | ( | CkMigrateMessage * | ) | [inline] |
| void pose::pup | ( | PUP::er & | p | ) | [inline, virtual] |
| void pose::registerCallBack | ( | callBack * | cbm | ) |
Register the callback with POSE.
Definition at line 231 of file pose.C.
References callBack::callback, callBackSet, and cb.
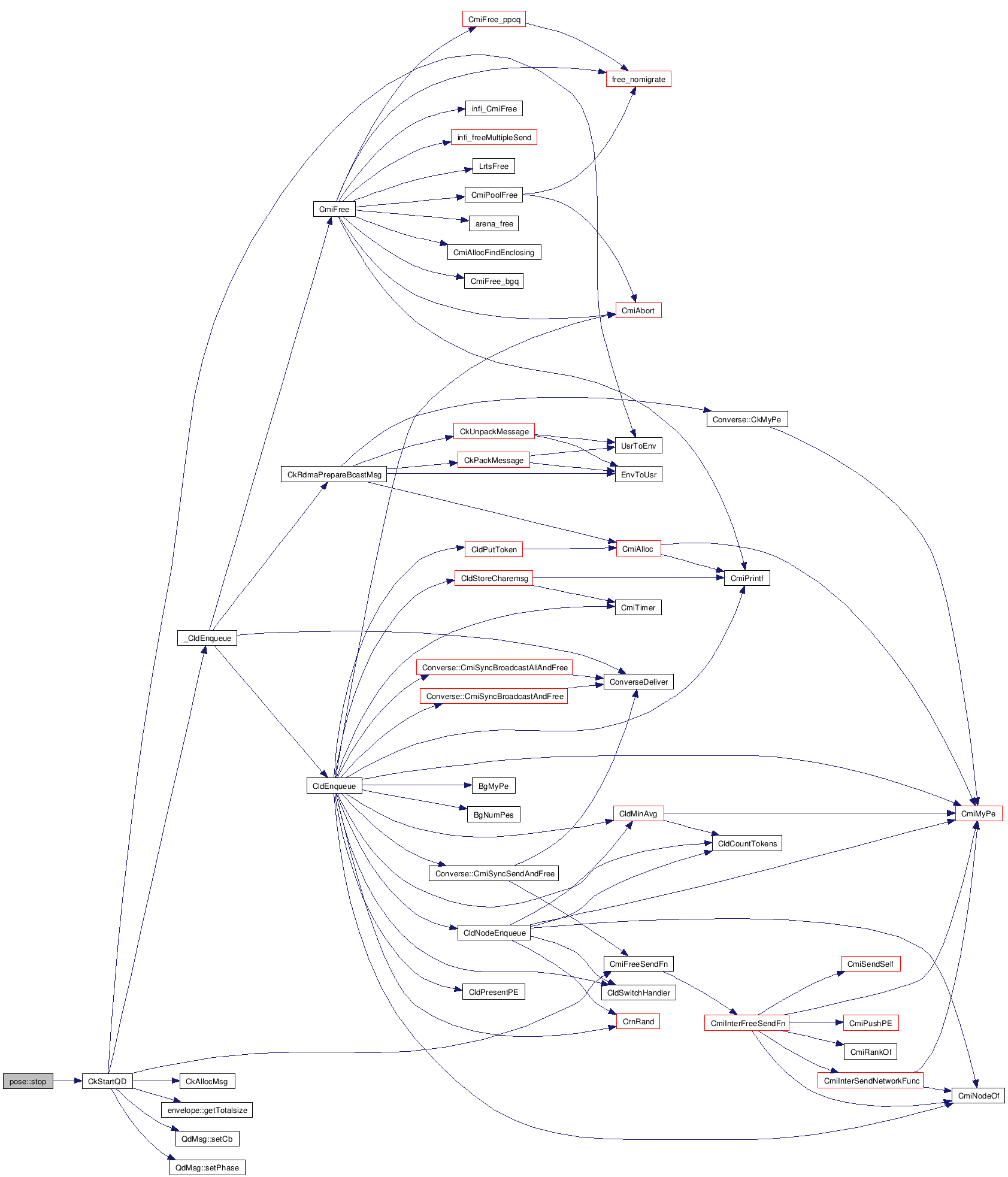
| void pose::stop | ( | void | ) |
Stop the simulation.
Stops timer and gathers POSE statistics and proceeds to exit.
Definition at line 238 of file pose.C.
References CkStartQD(), POSE_Coordinator_ID, POSE_GlobalClock, POSE_Objects, poseIndexOfStopEvent, and seqCheckpointInProgress.
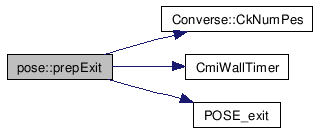
| void pose::prepExit | ( | void | ) |
Exit the simulation.
dump stats if enabled and exit
Executes callback before terminating program. handle stats output before exiting if necessary
Definition at line 262 of file pose.C.
References Converse::CkNumPes(), CmiWallTimer(), POSE_exit(), sim_timer, POSE_Config::stats, and theLocalStats.
| void pose::exit | ( | void | ) |
Exit the simulation.
Definition at line 286 of file pose.C.
References callBackSet, cb, CkExit(), and CkCallback::send().

CkCallback pose::cb [private] |
A callback to execute on termination.
If this is used, control is turned over to this at the very end of the simulation.
Definition at line 184 of file pose.h.
Referenced by exit(), pup(), and registerCallBack().
int pose::callBackSet [private] |
Flag to indicate if a callback will be used.
Definition at line 186 of file pose.h.
Referenced by exit(), pup(), and registerCallBack().
 1.5.5
1.5.5