
Data Structures | |
| class | TraceControlPoints |
| An instrumentation module making use of the tracing framework hooks provided in Charm++. More... | |
| class | redistributor2DMsg |
| A message containing a chunk of a data array used when redistributing to a different set of active chares. More... | |
| class | redistributor2D |
| A chare group that can redistribute user data arrays. It is used by binding it to a user's Chare Array. More... | |
| class | controlPointMain |
| A mainchare that is used just to create our controlPointManager group at startup. More... | |
| class | controlPointMsg |
| A message used for signaling changes in control point values. More... | |
| class | idleTimeContainer |
| A container that stores idle time statistics (min/max/avg etc.). More... | |
| class | overheadContainer |
| A container that stores overhead statistics (min/max/avg etc.). More... | |
| class | instrumentedPhase |
| Stores data for a phase (a time range in which a single set of control point values is used). More... | |
| class | instrumentedData |
| Stores and manipulate all known instrumented phases. One instance of this exists on each PE in its local controlPointManager. More... | |
| class | simplexScheme |
| A class that implements the Nelder Mead Simplex Optimization Algorithm. More... | |
| class | controlPointManager |
Typedefs | |
| typedef enum tuningSchemeEnum | tuningScheme |
Enumerations | |
| enum | tuningSchemeEnum { RandomSelection, SimulatedAnnealing, ExhaustiveSearch, CriticalPathAutoPrioritization, UseBestKnownTiming, UseSteering, MemoryAware, Simplex, DivideAndConquer, AlwaysDefaults, LDBPeriod, LDBPeriodLinear, LDBPeriodQuadratic, LDBPeriodOptimal } |
Functions | |
| CkpvStaticDeclare (TraceControlPoints *, _trace) | |
| void | _createTracecontrolPoints (char **argv) |
| For each TraceFoo module, _createTraceFoo() must be defined. | |
| TraceControlPoints * | localControlPointTracingInstance () |
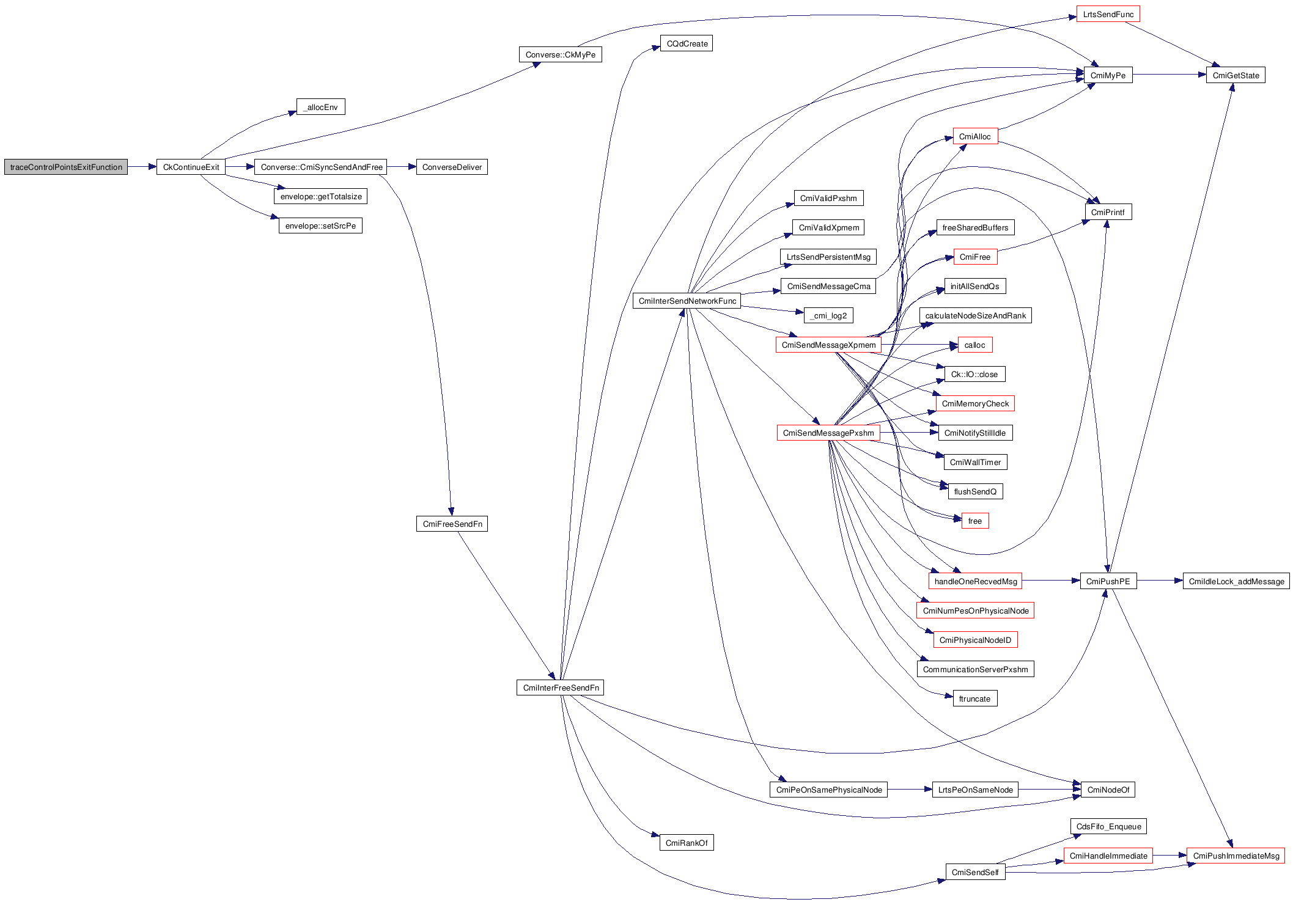
| void | traceControlPointsExitFunction () |
| void | initTraceControlPointsBOC () |
| static int | maxi (int a, int b) |
| Integer Maximum. | |
| static int | mini (int a, int b) |
| Integer Minimum. | |
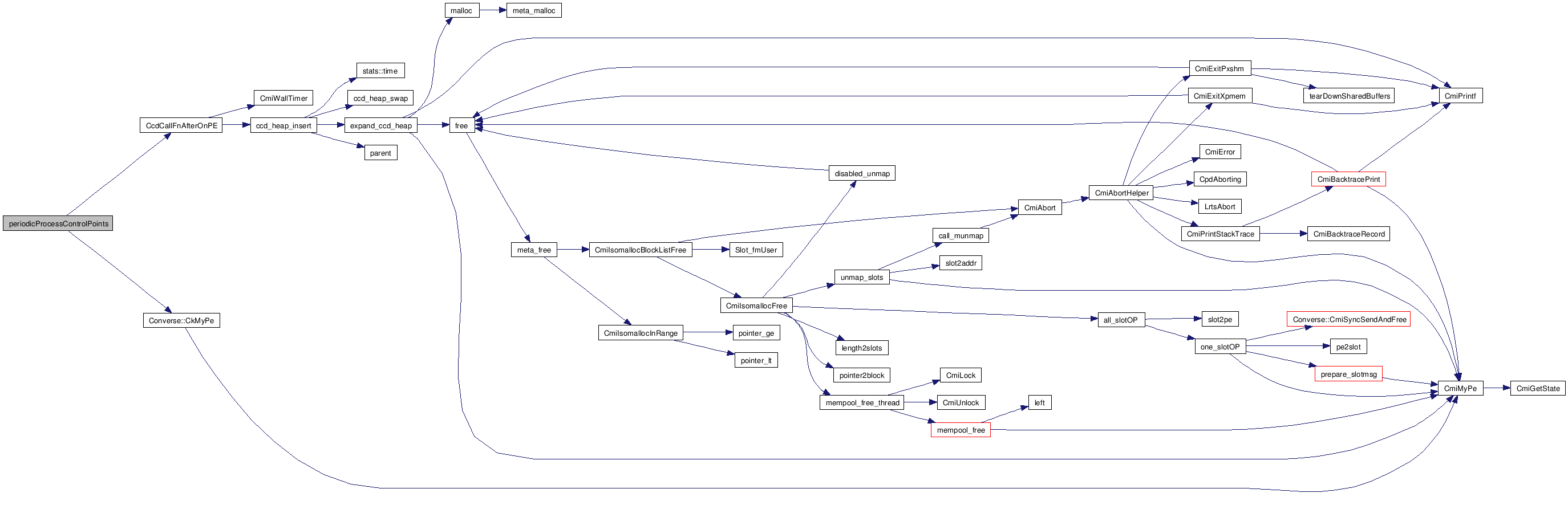
| static void | periodicProcessControlPoints (void *ptr, double currWallTime) |
| Called periodically to allow control point framework to do things periodically. | |
| void | printTuningScheme () |
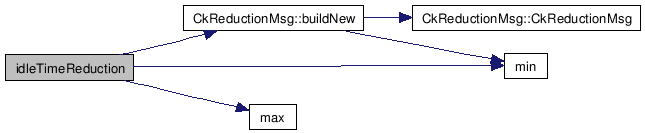
| CkReductionMsg * | idleTimeReduction (int nMsg, CkReductionMsg **msgs) |
| A reducer that combines idle time measurements (min/sum/max etc.). | |
| CkReductionMsg * | allMeasuresReduction (int nMsg, CkReductionMsg **msgs) |
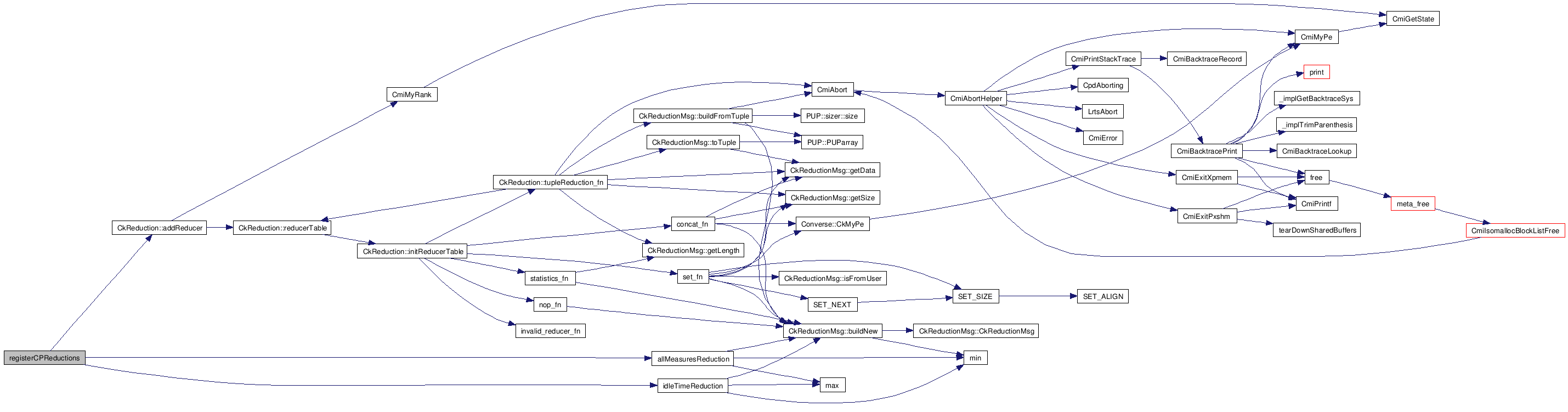
| void | registerCPReductions (void) |
| Registers the control point framework's reduction handlers at startup on each PE. | |
| unsigned int | randInt (unsigned int num, const char *name, int seed=0) |
| Return an integer between 0 and num-1 inclusive If different seed, name, and random_seed values are provided, the returned values are pseudo-random. | |
| void | gotoNextPhase () |
| An interface callable by the application. | |
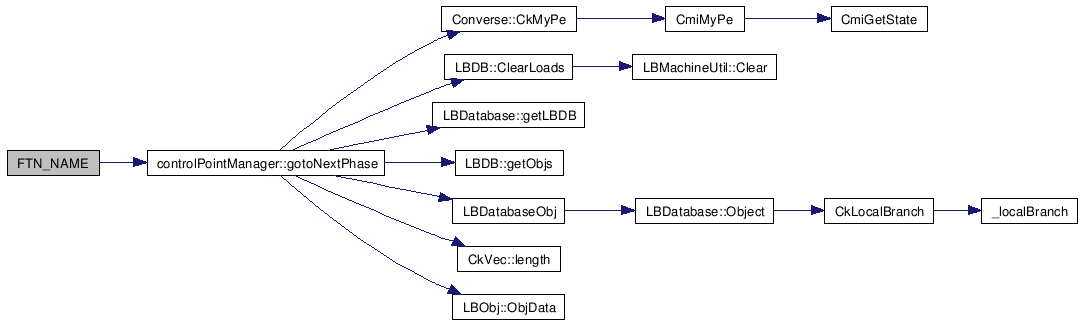
| FLINKAGE void | FTN_NAME (GOTONEXTPHASE, gotonextphase)() |
| void | registerCPChangeCallback (CkCallback cb, bool frameworkShouldAdvancePhase) |
| An interface callable by the application. | |
| void | setFrameworkAdvancePhase (bool frameworkShouldAdvancePhase) |
| An interface callable by the application. | |
| void | registerControlPointTiming (double time) |
| An interface callable by the application. | |
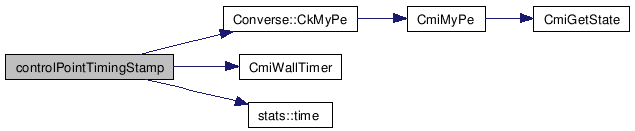
| void | controlPointTimingStamp () |
| An interface callable by the application. | |
| FLINKAGE void | FTN_NAME (CONTROLPOINTTIMINGSTAMP, controlpointtimingstamp)() |
| FLINKAGE void | FTN_NAME (SETFRAMEWORKADVANCEPHASEF, setframeworkadvancephasef) |
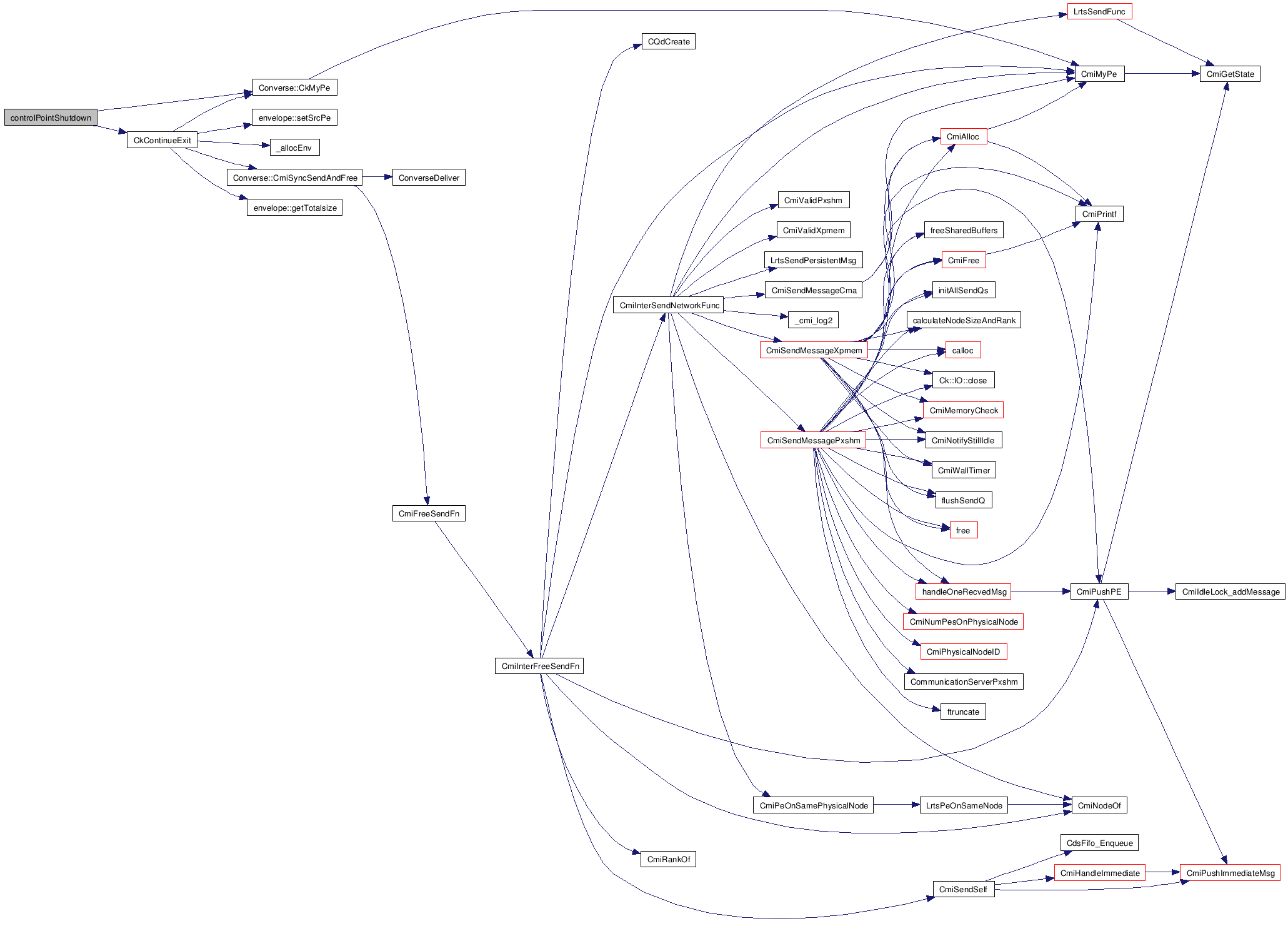
| void | controlPointShutdown () |
| Shutdown the control point framework, writing data to disk if necessary. | |
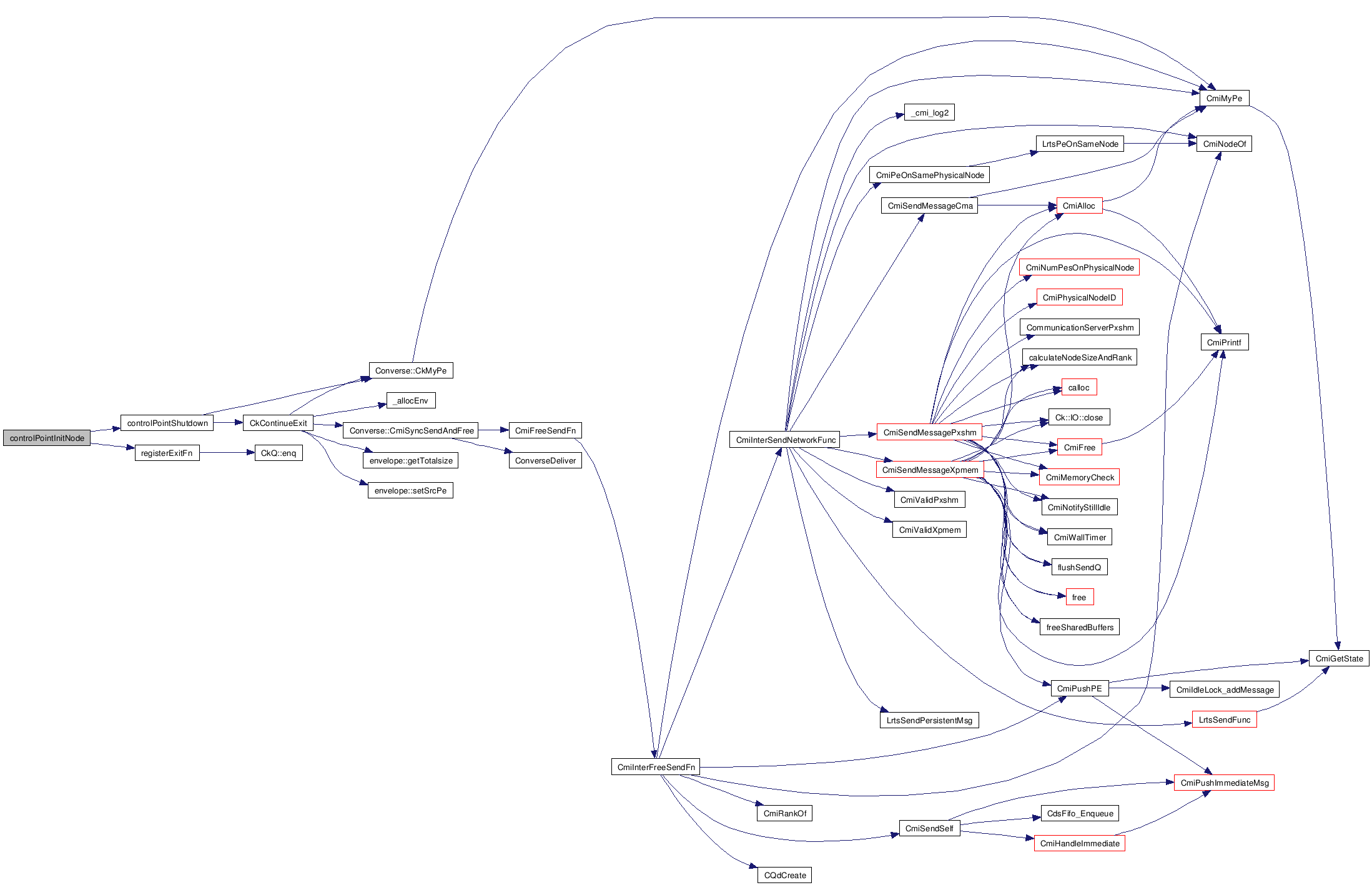
| void | controlPointInitNode () |
| A function called at startup on each node to register controlPointShutdown() to be called at CkExit(). | |
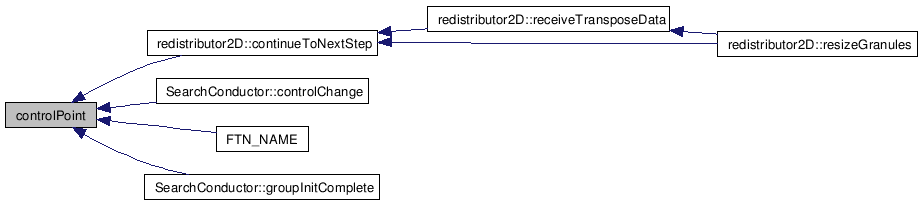
| int | controlPoint (const char *name, int lb, int ub) |
| Get control point value from range of integers [lb,ub]. | |
| FLINKAGE int | FTN_NAME (CONTROLPOINT, controlpoint)(CMK_TYPEDEF_INT4 *lb |
| A fortran callable one. | |
| void | ControlPointWriteOutputToDisk () |
| Write output data to disk. Callable from user program (for example, to periodically flush to disk if program might run out of time, or NAMD). | |
| int | controlPoint2Pow (const char *name, int c1, int c2) |
| Return an integral power of 2 between c1 and c2 The value returned will likely change between subsequent invocations. | |
| int | controlPoint (const char *name, std::vector< int > &values) |
| Return an integer from the provided vector of values The value returned will likely change between subsequent invocations. | |
| TraceControlPoints::TraceControlPoints (char **argv) | |
| void | TraceControlPoints::traceBegin (void) |
| void | TraceControlPoints::traceEnd (void) |
| void | TraceControlPoints::userEvent (int eventID) |
| void | TraceControlPoints::userBracketEvent (int eventID, double bt, double et) |
| void | TraceControlPoints::creation (envelope *, int epIdx, int num=1) |
| void | TraceControlPoints::creationMulticast (envelope *, int epIdx, int num=1, const int *pelist=NULL) |
| void | TraceControlPoints::creationDone (int num=1) |
| void | TraceControlPoints::messageRecv (char *env, int pe) |
| void | TraceControlPoints::beginExecute (CmiObjId *tid) |
| void | TraceControlPoints::beginExecute (envelope *) |
| void | TraceControlPoints::beginExecute (int event, int msgType, int ep, int srcPe, int ml, CmiObjId *idx) |
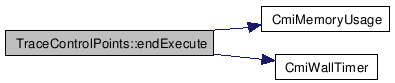
| void | TraceControlPoints::endExecute (void) |
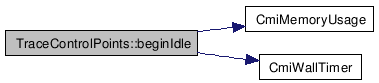
| void | TraceControlPoints::beginIdle (double curWallTime) |
| void | TraceControlPoints::endIdle (double curWallTime) |
| void | TraceControlPoints::beginComputation (void) |
| void | TraceControlPoints::endComputation (void) |
| void | TraceControlPoints::malloc (void *where, int size, void **stack, int stackSize) |
| void | TraceControlPoints::free (void *where, int size) |
| void | TraceControlPoints::traceClose () |
| void | TraceControlPoints::resetTimings () |
| reset the idle time and entry method execution time accumulators | |
| void | TraceControlPoints::resetAll () |
| Reset the idle, overhead, and memory measurements. | |
| int | redistributor2D::top_data_idx () |
| The index in the global array for my top row. | |
| int | redistributor2D::bottom_data_idx () |
| int | redistributor2D::left_data_idx () |
| int | redistributor2D::right_data_idx () |
| int | redistributor2D::top_neighbor () |
| int | redistributor2D::bottom_neighbor () |
| int | redistributor2D::left_neighbor () |
| int | redistributor2D::right_neighbor () |
| int | redistributor2D::mywidth () |
| the width of the non-ghost part of the local partition | |
| int | redistributor2D::myheight () |
| the height (Y dimension) of the non-ghost part of the local partition | |
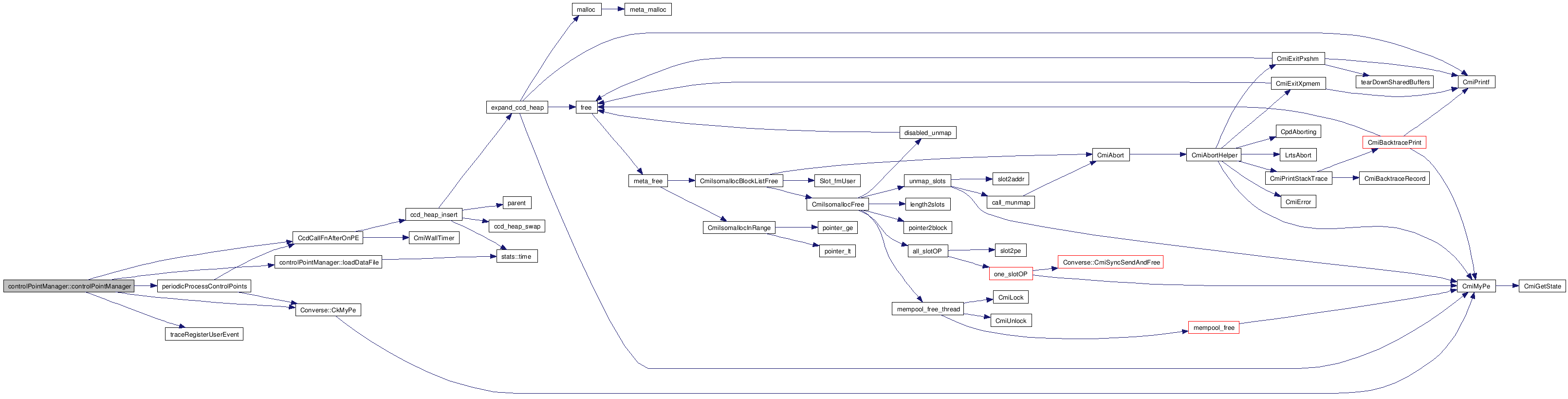
| controlPointManager::controlPointManager () | |
| controlPointManager::~controlPointManager () | |
| void | controlPointManager::pup (PUP::er &p) |
| void | controlPointManager::loadDataFile () |
| Loads the previous run data file. | |
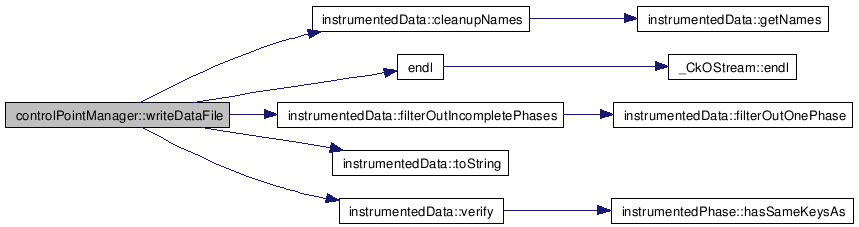
| void | controlPointManager::writeDataFile () |
| Add the current data to allData and output it to a file. | |
| void | controlPointManager::setCPCallback (CkCallback cb, bool _frameworkShouldAdvancePhase) |
| User can register a callback that is called when application should advance to next phase. | |
| void | controlPointManager::setFrameworkAdvancePhase (bool _frameworkShouldAdvancePhase) |
| A user can specify that the framework should advance the phases automatically. Useful for gather performance measurements without modifying a program. | |
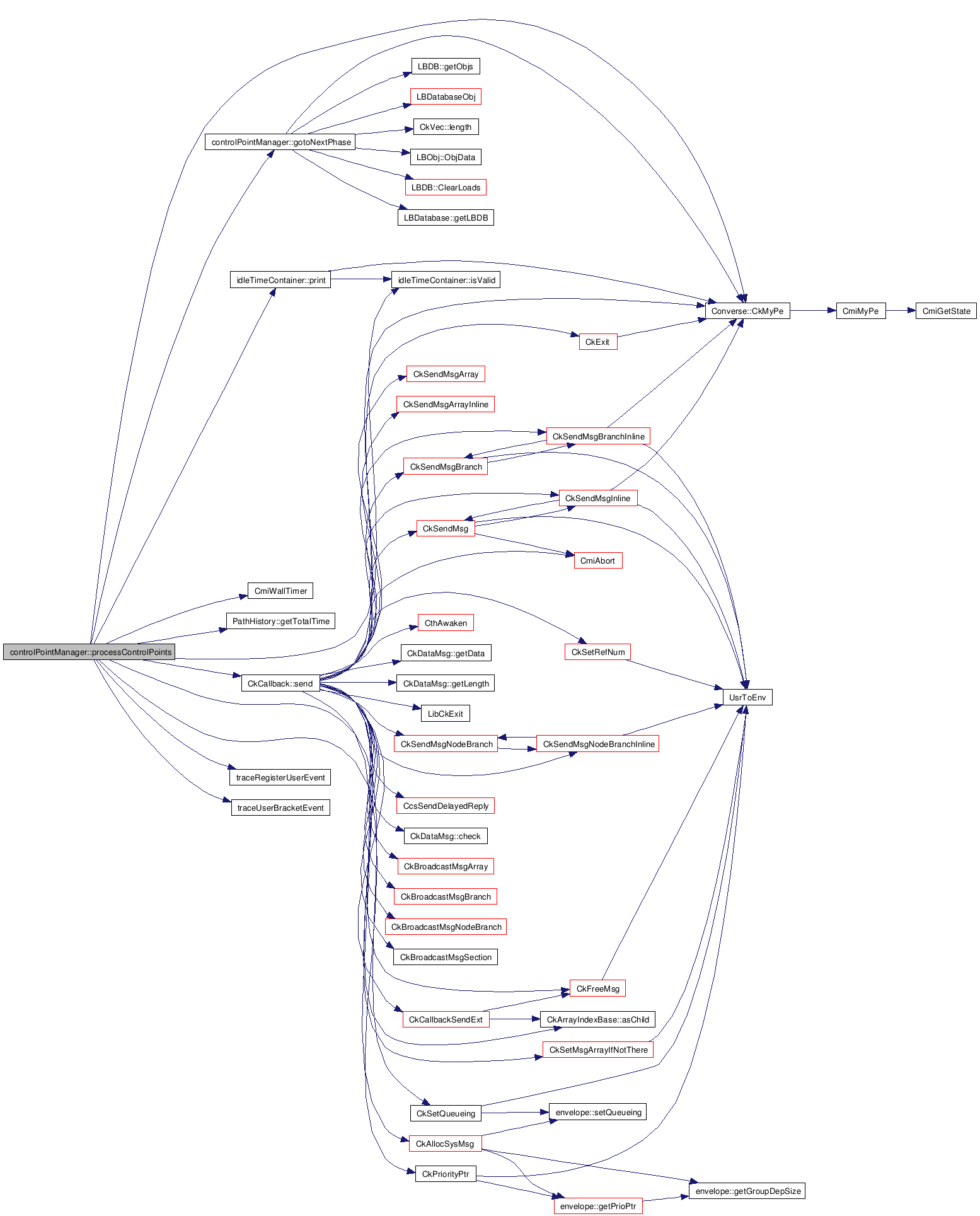
| void | controlPointManager::processControlPoints () |
| Called periodically by the runtime to handle the control points Currently called on each PE. | |
| bool | controlPointManager::controlPointAffectsThisEP (int ep) |
| Determine if any control point is known to affect an entry method. | |
| bool | controlPointManager::controlPointAffectsThisArray (int array) |
| Determine if any control point is known to affect a chare array. | |
| instrumentedPhase * | controlPointManager::currentPhaseData () |
| The data for the current phase. | |
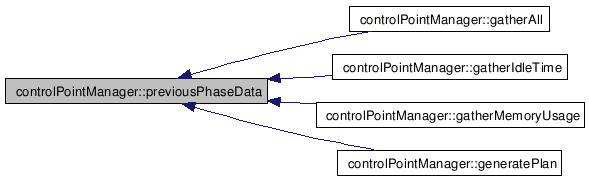
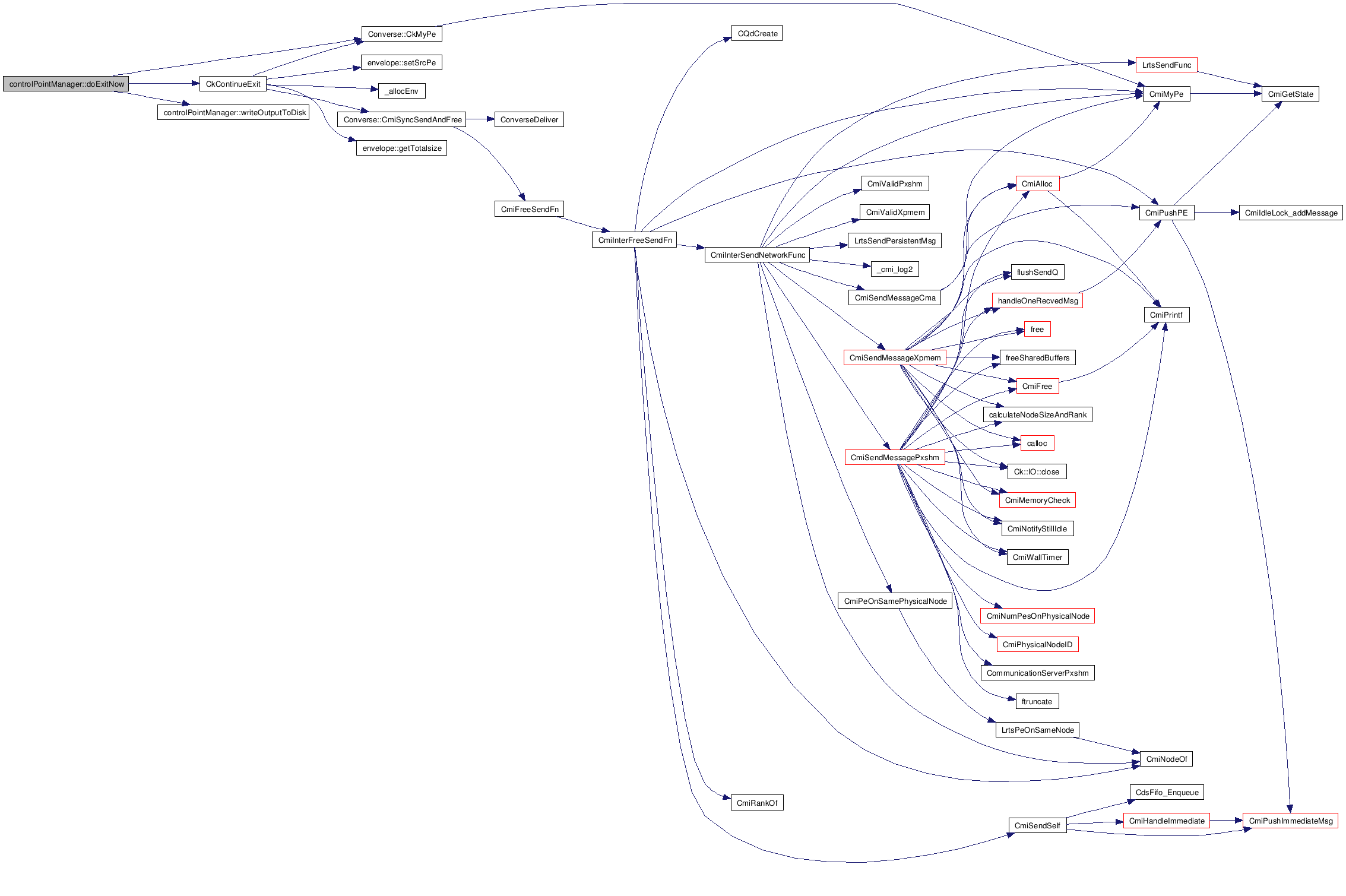
| instrumentedPhase * | controlPointManager::previousPhaseData () |
| The data from the previous phase. | |
| instrumentedPhase * | controlPointManager::twoAgoPhaseData () |
| The data from two phases back. | |
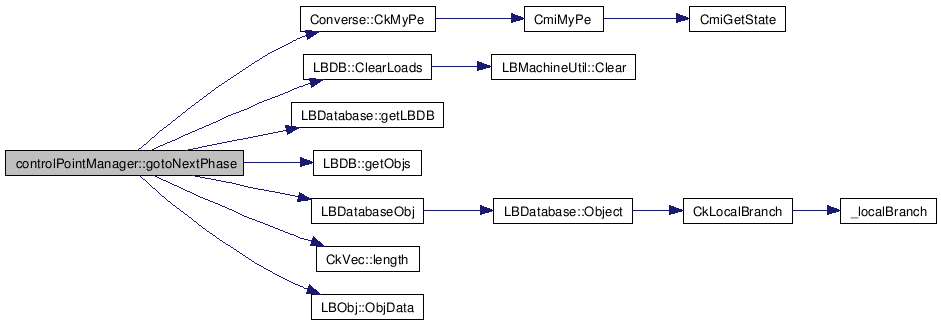
| void | controlPointManager::gotoNextPhase () |
| Called by either the application or the Control Point Framework to advance to the next phase. | |
| void | controlPointManager::setTiming (double time) |
| An application uses this to register an instrumented timing for this phase. | |
| void | controlPointManager::requestIdleTime (CkCallback cb) |
| Entry method called on all PEs to request memory usage. | |
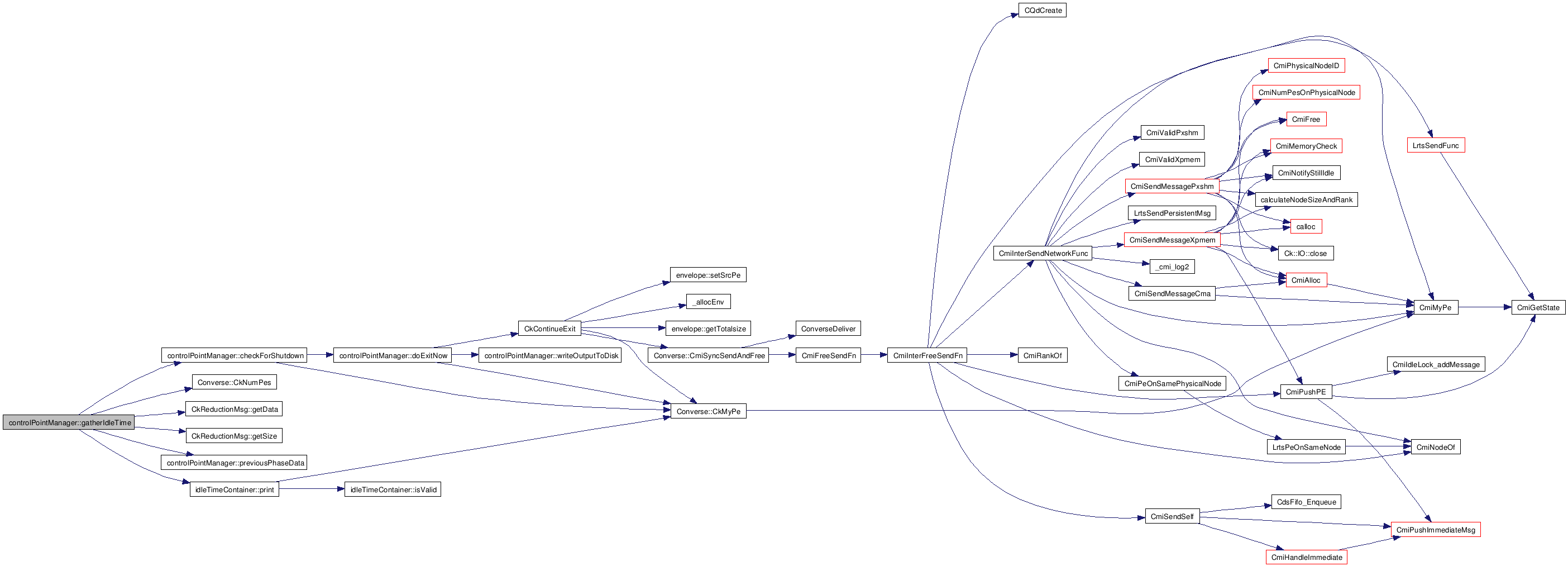
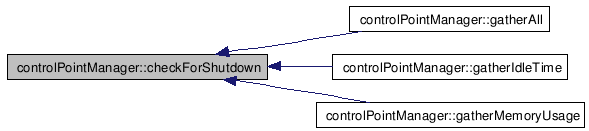
| void | controlPointManager::gatherIdleTime (CkReductionMsg *msg) |
| All processors reduce their memory usages in requestIdleTime() to this method. | |
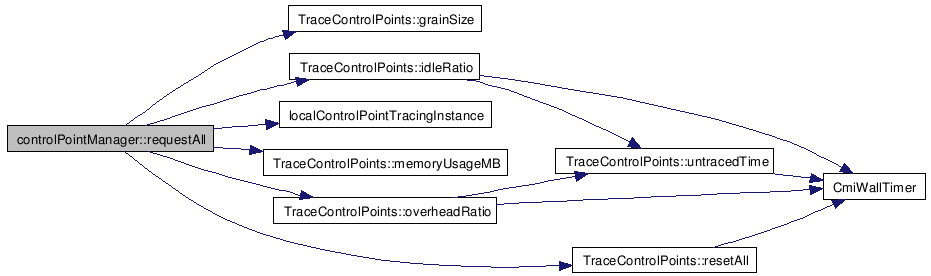
| void | controlPointManager::requestAll (CkCallback cb) |
| Entry method called on all PEs to request Idle, Overhead, and Memory measurements. | |
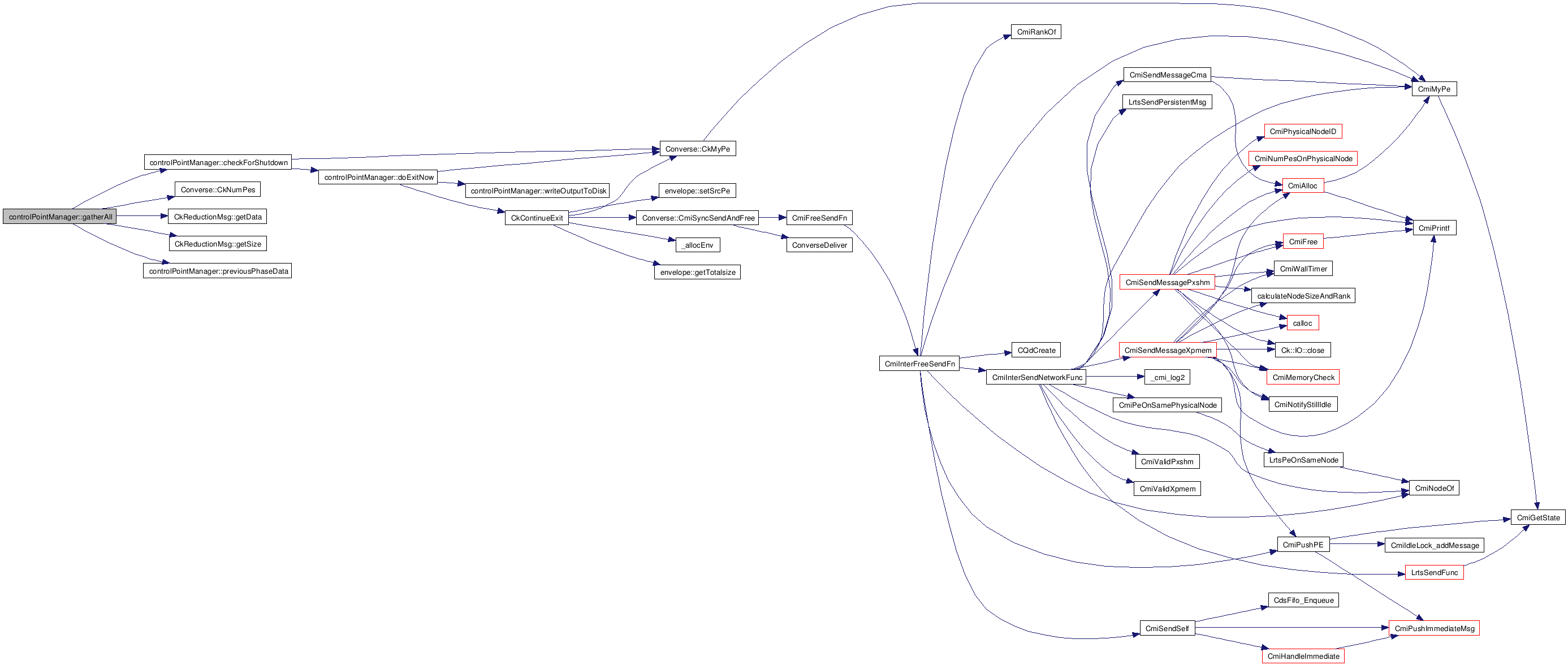
| void | controlPointManager::gatherAll (CkReductionMsg *msg) |
| All processors reduce their memory usages in requestIdleTime() to this method. | |
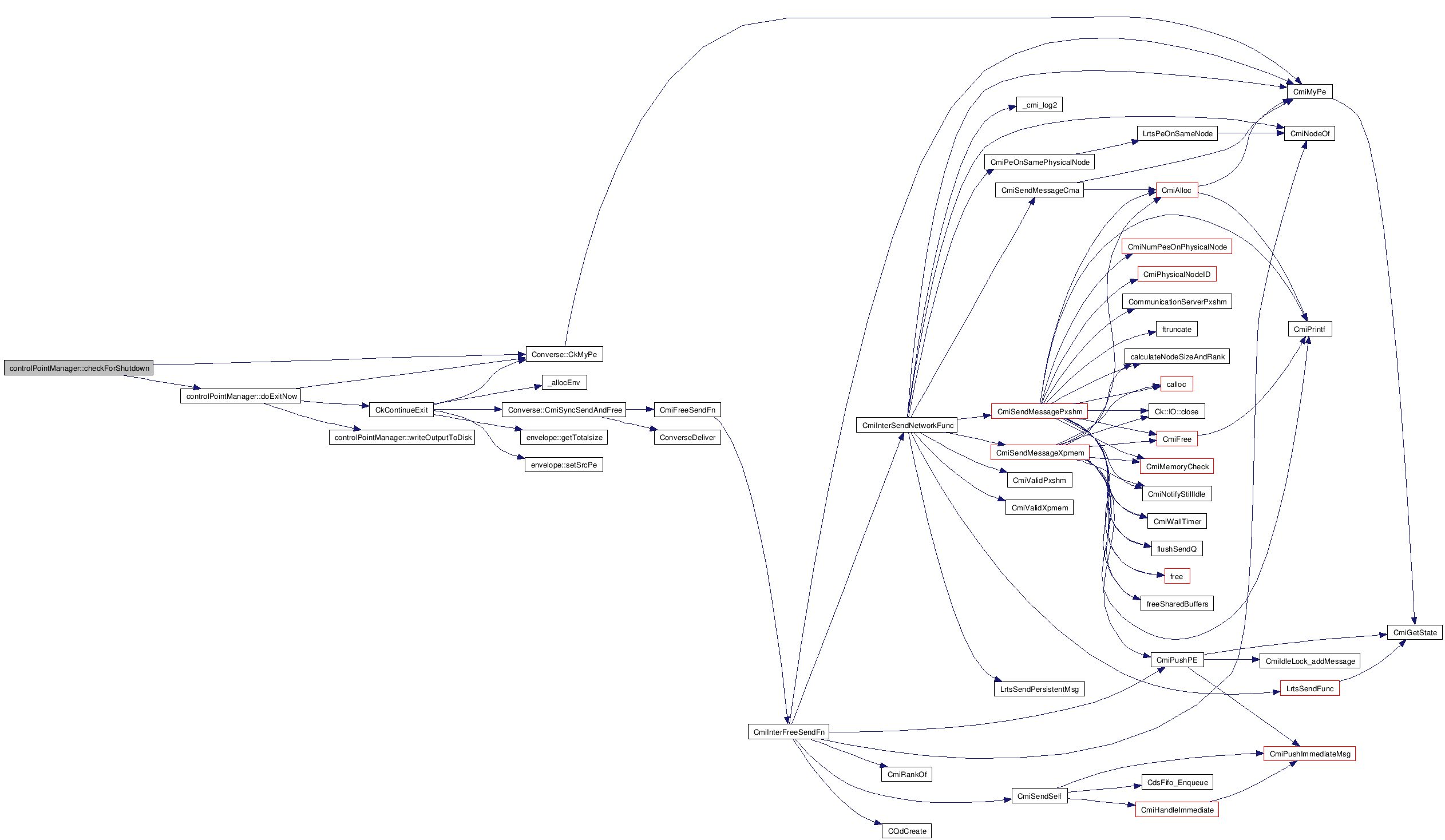
| void | controlPointManager::checkForShutdown () |
| Check to see if we are in the shutdown process, and handle it appropriately. | |
| void | controlPointManager::exitIfReady () |
| Start shutdown procedures for the controlPoints module(s). | |
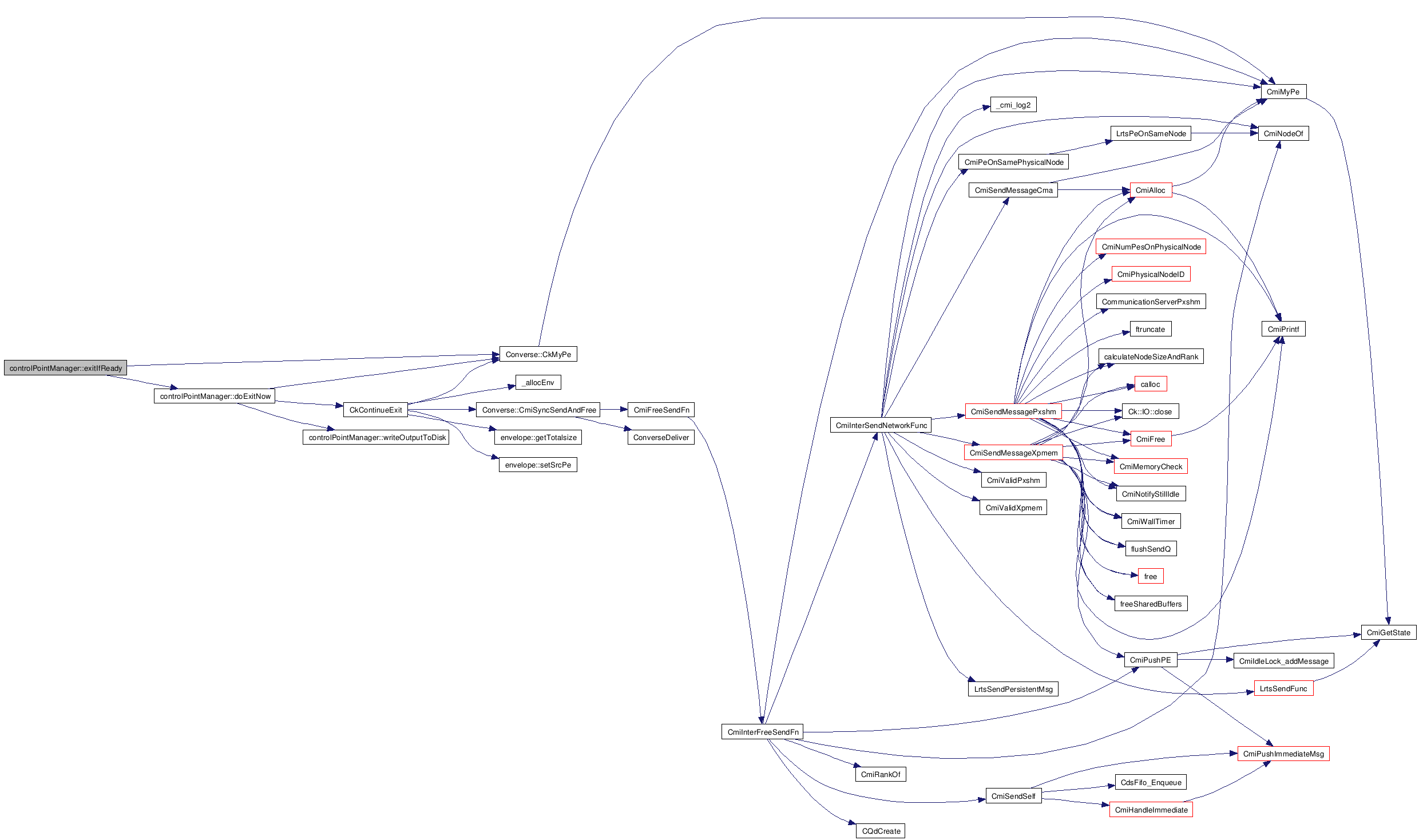
| void | controlPointManager::doExitNow () |
| All outstanding operations have completed, so do the shutdown now. First write files to disk, and then call CkExit(). | |
| void | controlPointManager::writeOutputToDisk () |
| Write data to disk (when needed), likely at exit. | |
| void | controlPointManager::requestMemoryUsage (CkCallback cb) |
| Entry method called on all PEs to request memory usage. | |
| void | controlPointManager::gatherMemoryUsage (CkReductionMsg *msg) |
| All processors reduce their memory usages to this method. | |
| void | controlPointManager::generatePlan () |
| Generate a plan (new control point values) once per phase. | |
| void | simplexScheme::adapt (std::map< std::string, std::pair< int, int > > &controlPointSpace, std::map< std::string, int > &newControlPoints, const int phase_id, instrumentedData &allData) |
| Inform the control point framework that a named control point affects the priorities of some array. | |
| void | simplexScheme::doReflection (std::map< std::string, std::pair< int, int > > &controlPointSpace, std::map< std::string, int > &newControlPoints, const int phase_id, instrumentedData &allData) |
| Replace the worst point with its reflection across the centroid. | |
| void | simplexScheme::doExpansion (std::map< std::string, std::pair< int, int > > &controlPointSpace, std::map< std::string, int > &newControlPoints, const int phase_id, instrumentedData &allData) |
| Replace the newly tested reflection with a further expanded version of itself. | |
| void | simplexScheme::doContraction (std::map< std::string, std::pair< int, int > > &controlPointSpace, std::map< std::string, int > &newControlPoints, const int phase_id, instrumentedData &allData) |
| Replace the newly tested reflection with a further expanded version of itself. | |
| void | simplexScheme::computeCentroidBestWorst (std::map< std::string, std::pair< int, int > > &controlPointSpace, std::map< std::string, int > &newControlPoints, const int phase_id, instrumentedData &allData) |
| std::vector< double > | simplexScheme::pointCoords (instrumentedData &allData, int i) |
Variables | |
| CkGroupID | traceControlPointsGID |
| CProxy_controlPointManager | controlPointManagerProxy |
| int | random_seed |
| long | controlPointSamplePeriod |
| int | whichTuningScheme |
| bool | writeDataFileAtShutdown |
| bool | shouldFilterOutputData |
| bool | loadDataFileAtStartup |
| bool | shouldGatherMemoryUsage |
| bool | shouldGatherUtilization |
| bool | shouldGatherAll |
| char | CPDataFilename [512] |
| bool | enableCPTracing |
| std::map< std::string, int > | defaultControlPointValues |
| The control point values to be used for the first few phases if the strategy doesn't choose to do something else. | |
| CkReduction::reducerType | idleTimeReductionType |
| A reduction type that combines idle time measurements (min/sum/max etc.). | |
| CkReduction::reducerType | allMeasuresReductionType |
| A reduction type that combines idle, overhead, and memory measurements. | |
| CProxy_controlPointManager | controlPointManagerProxy |
| int | random_seed |
| long | controlPointSamplePeriod |
| int | whichTuningScheme |
| bool | writeDataFileAtShutdown |
| bool | shouldFilterOutputData |
| bool | loadDataFileAtStartup |
| char | CPDataFilename [512] |
| FLINKAGE int CMK_TYPEDEF_INT4 * | ub |
| typedef enum tuningSchemeEnum tuningScheme |
| enum tuningSchemeEnum |
Definition at line 66 of file controlPoints.C.
| CkpvStaticDeclare | ( | TraceControlPoints * | , | |
| _trace | ||||
| ) |
| void _createTracecontrolPoints | ( | char ** | argv | ) |
For each TraceFoo module, _createTraceFoo() must be defined.
This function is called in _createTraces() generated in moduleInit.C
This module is special in that it is always included in charm, but sometimes it does nothing. This is called on all processors in SMP version.
Definition at line 27 of file trace-controlPoints.C.
Referenced by traceCommonInit().

| TraceControlPoints * localControlPointTracingInstance | ( | ) |
Definition at line 237 of file trace-controlPoints.C.
Referenced by controlPointManager::requestAll(), and controlPointManager::requestIdleTime().

| void traceControlPointsExitFunction | ( | ) |
Definition at line 243 of file trace-controlPoints.C.
References CkContinueExit().
| void initTraceControlPointsBOC | ( | ) |
Definition at line 248 of file trace-controlPoints.C.
Integer Maximum.
Definition at line 44 of file arrayRedistributor.h.
Referenced by AddEdges(), and redistributor2D::resizeGranules().

Integer Minimum.
Definition at line 52 of file arrayRedistributor.h.
Referenced by redistributor2D::resizeGranules().

| static void periodicProcessControlPoints | ( | void * | ptr, | |
| double | currWallTime | |||
| ) | [static] |
Called periodically to allow control point framework to do things periodically.
Definition at line 1247 of file controlPoints.C.
References CcdCallFnAfterOnPE(), Converse::CkMyPe(), controlPointManagerProxy, and controlPointSamplePeriod.
Referenced by controlPointManager::controlPointManager().

| void printTuningScheme | ( | ) |
Definition at line 70 of file controlPoints.C.
References AlwaysDefaults, CriticalPathAutoPrioritization, DivideAndConquer, ExhaustiveSearch, LDBPeriod, LDBPeriodLinear, LDBPeriodOptimal, LDBPeriodQuadratic, MemoryAware, RandomSelection, Simplex, SimulatedAnnealing, UseBestKnownTiming, UseSteering, and whichTuningScheme.
Referenced by controlPointManager::generatePlan().

| CkReductionMsg* idleTimeReduction | ( | int | nMsg, | |
| CkReductionMsg ** | msgs | |||
| ) |
A reducer that combines idle time measurements (min/sum/max etc.).
Definition at line 126 of file controlPoints.C.
References CkReductionMsg::buildNew(), PUP::m, max(), and min().
Referenced by registerCPReductions().

| CkReductionMsg* allMeasuresReduction | ( | int | nMsg, | |
| CkReductionMsg ** | msgs | |||
| ) |
Definition at line 151 of file controlPoints.C.
References CkReductionMsg::buildNew(), PUP::m, max(), and min().
Referenced by registerCPReductions().


| void registerCPReductions | ( | void | ) |
Registers the control point framework's reduction handlers at startup on each PE.
Definition at line 184 of file controlPoints.C.
References CkReduction::addReducer(), allMeasuresReduction(), allMeasuresReductionType, idleTimeReduction(), and idleTimeReductionType.
Return an integer between 0 and num-1 inclusive If different seed, name, and random_seed values are provided, the returned values are pseudo-random.
Definition at line 196 of file controlPoints.C.
References c, and random_seed.
Referenced by simplexScheme::adapt(), and controlPointManager::generatePlan().

| void gotoNextPhase | ( | ) |
An interface callable by the application.
The application specifies that it is ready to proceed to a new set of control point values.
This should be called after registerControlPointTiming() This should be called before calling controlPoint()
Definition at line 1026 of file controlPoints.C.
References controlPointManagerProxy.
| FLINKAGE void FTN_NAME | ( | GOTONEXTPHASE | , | |
| gotonextphase | ||||
| ) |
Definition at line 1030 of file controlPoints.C.
References controlPointManager::gotoNextPhase().
| void registerCPChangeCallback | ( | CkCallback | cb, | |
| bool | frameworkShouldAdvancePhase | |||
| ) |
An interface callable by the application.
Definition at line 1176 of file controlPoints.C.
References Converse::CkMyPe(), and controlPointManagerProxy.
Referenced by SearchConductor::groupInitComplete().


| void setFrameworkAdvancePhase | ( | bool | frameworkShouldAdvancePhase | ) |
An interface callable by the application.
Definition at line 1183 of file controlPoints.C.
References Converse::CkMyPe(), and controlPointManagerProxy.

| void registerControlPointTiming | ( | double | time | ) |
An interface callable by the application.
Definition at line 1191 of file controlPoints.C.
References Converse::CkMyPe(), and controlPointManagerProxy.

| void controlPointTimingStamp | ( | ) |
An interface callable by the application.
Called once each application step. Can be used instead of registerControlPointTiming().
Definition at line 1200 of file controlPoints.C.
References Converse::CkMyPe(), CmiWallTimer(), controlPointManagerProxy, PUP::t, and stats::time().
Referenced by SearchConductor::controlChange(), and FTN_NAME().

| FLINKAGE void FTN_NAME | ( | CONTROLPOINTTIMINGSTAMP | , | |
| controlpointtimingstamp | ||||
| ) |
Definition at line 1214 of file controlPoints.C.
References controlPointTimingStamp().

| FLINKAGE void FTN_NAME | ( | SETFRAMEWORKADVANCEPHASEF | , | |
| setframeworkadvancephasef | ||||
| ) |
Definition at line 1220 of file controlPoints.C.
References controlPointManager::setFrameworkAdvancePhase(), and value.

| void controlPointShutdown | ( | ) |
Shutdown the control point framework, writing data to disk if necessary.
Definition at line 1229 of file controlPoints.C.
References CkContinueExit(), Converse::CkMyPe(), and controlPointManagerProxy.
Referenced by controlPointInitNode().

| void controlPointInitNode | ( | ) |
A function called at startup on each node to register controlPointShutdown() to be called at CkExit().
Definition at line 1242 of file controlPoints.C.
References controlPointShutdown(), and registerExitFn().
Get control point value from range of integers [lb,ub].
Return an integer between lb and ub inclusive The value returned will likely change between subsequent invocations.
Definition at line 2174 of file controlPoints.C.
References AlwaysDefaults, controlPointManagerProxy, instrumentedPhase::controlPoints, controlPointManager::controlPointSpace, defaultControlPointValues, endl(), controlPointManager::phase_id, and whichTuningScheme.
Referenced by redistributor2D::continueToNextStep(), SearchConductor::controlChange(), FTN_NAME(), and SearchConductor::groupInitComplete().

| FLINKAGE int FTN_NAME | ( | CONTROLPOINT | , | |
| controlpoint | ||||
| ) |
A fortran callable one.
I couldn't figure out how to pass a string from fortran to C++ yet So far fortran can only have one control point
Definition at line 2228 of file controlPoints.C.
References Converse::CkMyPe(), controlPoint(), lb, and ub.

| void ControlPointWriteOutputToDisk | ( | ) |
Write output data to disk. Callable from user program (for example, to periodically flush to disk if program might run out of time, or NAMD).
Definition at line 2724 of file controlPoints.C.
References Converse::CkMyPe(), and controlPointManagerProxy.

Return an integral power of 2 between c1 and c2 The value returned will likely change between subsequent invocations.
Return an integer from the provided vector of values The value returned will likely change between subsequent invocations.
| TraceControlPoints::TraceControlPoints | ( | char ** | argv | ) | [inherited] |
Definition at line 34 of file trace-controlPoints.C.
References TraceControlPoints::b1, TraceControlPoints::b2, TraceControlPoints::b3, TraceControlPoints::nesting_level, TraceControlPoints::resetTimings(), and TraceControlPoints::whenStoppedTracing.

| void TraceControlPoints::traceBegin | ( | void | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 53 of file trace-controlPoints.C.
References Converse::CkMyPe(), CmiWallTimer(), TraceControlPoints::totalUntracedTime, and TraceControlPoints::whenStoppedTracing.

| void TraceControlPoints::traceEnd | ( | void | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 61 of file trace-controlPoints.C.
References Converse::CkMyPe(), CmiWallTimer(), and TraceControlPoints::whenStoppedTracing.

| void TraceControlPoints::userEvent | ( | int | eventID | ) | [virtual, inherited] |
| void TraceControlPoints::userBracketEvent | ( | int | eventID, | |
| double | bt, | |||
| double | et | |||
| ) | [inherited] |
Definition at line 74 of file trace-controlPoints.C.
| void TraceControlPoints::creationDone | ( | int | num = 1 |
) | [virtual, inherited] |
| void TraceControlPoints::messageRecv | ( | char * | env, | |
| int | pe | |||
| ) | [inherited] |
Definition at line 91 of file trace-controlPoints.C.
| void TraceControlPoints::beginExecute | ( | CmiObjId * | tid | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 95 of file trace-controlPoints.C.
References TraceControlPoints::b1, CmiWallTimer(), TraceControlPoints::lastBeginExecuteTime, TraceControlPoints::lastbeginMessageSize, and TraceControlPoints::nesting_level.

| void TraceControlPoints::beginExecute | ( | envelope * | e | ) | [inherited] |
Definition at line 110 of file trace-controlPoints.C.
References TraceControlPoints::b2, TraceControlPoints::b2mlen, CmiWallTimer(), envelope::getTotalsize(), TraceControlPoints::lastBeginExecuteTime, TraceControlPoints::lastbeginMessageSize, and TraceControlPoints::nesting_level.

| void TraceControlPoints::beginExecute | ( | int | event, | |
| int | msgType, | |||
| int | ep, | |||
| int | srcPe, | |||
| int | ml, | |||
| CmiObjId * | idx | |||
| ) | [inherited] |
Definition at line 121 of file trace-controlPoints.C.
References TraceControlPoints::b3, TraceControlPoints::b3mlen, CmiWallTimer(), TraceControlPoints::lastBeginExecuteTime, TraceControlPoints::lastbeginMessageSize, and TraceControlPoints::nesting_level.

| void TraceControlPoints::endExecute | ( | void | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 133 of file trace-controlPoints.C.
References CmiMemoryUsage(), CmiWallTimer(), TraceControlPoints::lastBeginExecuteTime, PUP::m, TraceControlPoints::memUsage, TraceControlPoints::nesting_level, TraceControlPoints::totalEntryMethodInvocations, and TraceControlPoints::totalEntryMethodTime.
| void TraceControlPoints::beginIdle | ( | double | curWallTime | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 150 of file trace-controlPoints.C.
References CmiMemoryUsage(), CmiWallTimer(), TraceControlPoints::lastBeginIdle, PUP::m, and TraceControlPoints::memUsage.
| void TraceControlPoints::endIdle | ( | double | curWallTime | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 160 of file trace-controlPoints.C.
References CmiWallTimer(), TraceControlPoints::lastBeginIdle, and TraceControlPoints::totalIdleTime.

| void TraceControlPoints::beginComputation | ( | void | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 165 of file trace-controlPoints.C.
References Converse::CkMyPe().

| void TraceControlPoints::endComputation | ( | void | ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 173 of file trace-controlPoints.C.
References Converse::CkMyPe().

| void TraceControlPoints::malloc | ( | void * | where, | |
| int | size, | |||
| void ** | stack, | |||
| int | stackSize | |||
| ) | [virtual, inherited] |
Reimplemented from Trace.
Definition at line 178 of file trace-controlPoints.C.
References CmiMemoryUsage(), PUP::m, and TraceControlPoints::memUsage.

| void TraceControlPoints::free | ( | void * | where, | |
| int | size | |||
| ) | [virtual, inherited] |
| void TraceControlPoints::traceClose | ( | void | ) | [virtual, inherited] |
| void TraceControlPoints::resetTimings | ( | ) | [inherited] |
reset the idle time and entry method execution time accumulators
Definition at line 205 of file trace-controlPoints.C.
References CmiWallTimer(), TraceControlPoints::lastResetTime, TraceControlPoints::totalEntryMethodInvocations, TraceControlPoints::totalEntryMethodTime, TraceControlPoints::totalIdleTime, TraceControlPoints::totalUntracedTime, and TraceControlPoints::whenStoppedTracing.
Referenced by controlPointManager::requestIdleTime(), and TraceControlPoints::TraceControlPoints().


| void TraceControlPoints::resetAll | ( | ) | [inherited] |
Reset the idle, overhead, and memory measurements.
Definition at line 216 of file trace-controlPoints.C.
References TraceControlPoints::b2, TraceControlPoints::b2mlen, TraceControlPoints::b3, TraceControlPoints::b3mlen, CmiWallTimer(), TraceControlPoints::lastResetTime, TraceControlPoints::memUsage, TraceControlPoints::totalEntryMethodInvocations, TraceControlPoints::totalEntryMethodTime, TraceControlPoints::totalIdleTime, TraceControlPoints::totalUntracedTime, and TraceControlPoints::whenStoppedTracing.
Referenced by controlPointManager::requestAll().


| int redistributor2D::top_data_idx | ( | ) | [inherited] |
The index in the global array for my top row.
Definition at line 38 of file arrayRedistributor.C.
References redistributor2D::data_height, and redistributor2D::y_chares.
Referenced by redistributor2D::local_to_global_y(), redistributor2D::myheight(), redistributor2D::receiveTransposeData(), redistributor2D::resizeGranules(), and redistributor2D::who_owns_idx_y().

| int redistributor2D::bottom_data_idx | ( | ) | [inherited] |
Definition at line 42 of file arrayRedistributor.C.
References redistributor2D::data_height, and redistributor2D::y_chares.
Referenced by redistributor2D::myheight(), redistributor2D::receiveTransposeData(), redistributor2D::resizeGranules(), and redistributor2D::who_owns_idx_y().

| int redistributor2D::left_data_idx | ( | ) | [inherited] |
Definition at line 46 of file arrayRedistributor.C.
References redistributor2D::data_width, and redistributor2D::x_chares.
Referenced by redistributor2D::local_to_global_x(), redistributor2D::mywidth(), redistributor2D::receiveTransposeData(), redistributor2D::resizeGranules(), and redistributor2D::who_owns_idx_x().

| int redistributor2D::right_data_idx | ( | ) | [inherited] |
Definition at line 50 of file arrayRedistributor.C.
References redistributor2D::data_width, and redistributor2D::x_chares.
Referenced by redistributor2D::mywidth(), redistributor2D::receiveTransposeData(), redistributor2D::resizeGranules(), and redistributor2D::who_owns_idx_x().

| int redistributor2D::top_neighbor | ( | ) | [inherited] |
| int redistributor2D::bottom_neighbor | ( | ) | [inherited] |
| int redistributor2D::left_neighbor | ( | ) | [inherited] |
| int redistributor2D::right_neighbor | ( | ) | [inherited] |
| int redistributor2D::mywidth | ( | ) | [inherited] |
the width of the non-ghost part of the local partition
the width (X dimension) of the non-ghost part of the local partition
Definition at line 72 of file arrayRedistributor.C.
References redistributor2D::left_data_idx(), redistributor2D::right_data_idx(), and redistributor2D::thisElemActive.
Referenced by redistributor2D::local_to_padded(), redistributor2D::my_array_width(), and redistributor2D::resizeGranules().


| int redistributor2D::myheight | ( | ) | [inherited] |
the height (Y dimension) of the non-ghost part of the local partition
Definition at line 81 of file arrayRedistributor.C.
References redistributor2D::bottom_data_idx(), redistributor2D::thisElemActive, and redistributor2D::top_data_idx().
Referenced by redistributor2D::local_to_padded(), redistributor2D::my_array_height(), and redistributor2D::resizeGranules().


| controlPointManager::controlPointManager | ( | ) | [inherited] |
Definition at line 224 of file controlPoints.C.
References controlPointManager::allData, controlPointManager::alreadyRequestedAll, controlPointManager::alreadyRequestedIdleTime, controlPointManager::alreadyRequestedMemoryUsage, CcdCallFnAfterOnPE(), Converse::CkMyPe(), controlPointSamplePeriod, controlPointManager::exitWhenReady, controlPointManager::frameworkShouldAdvancePhase, controlPointManager::generatedPlanForStep, controlPointManager::haveControlPointChangeCallback, controlPointManager::loadDataFile(), loadDataFileAtStartup, periodicProcessControlPoints(), controlPointManager::phase_id, instrumentedData::phases, and traceRegisterUserEvent().
| controlPointManager::~controlPointManager | ( | ) | [inherited] |
Definition at line 265 of file controlPoints.C.
| void controlPointManager::pup | ( | PUP::er & | p | ) | [inherited] |
Definition at line 269 of file controlPoints.C.
References controlPointManager::alreadyRequestedAll, controlPointManager::alreadyRequestedIdleTime, controlPointManager::alreadyRequestedMemoryUsage, controlPointManager::exitWhenReady, controlPointManager::frameworkShouldAdvancePhase, controlPointManager::generatedPlanForStep, controlPointManager::haveControlPointChangeCallback, and controlPointManager::phase_id.
| void controlPointManager::loadDataFile | ( | ) | [inherited] |
Loads the previous run data file.
Definition at line 285 of file controlPoints.C.
References controlPointManager::allData, overheadContainer::avg, idleTimeContainer::avg, instrumentedPhase::bytesPerInvoke, instrumentedPhase::controlPoints, CPDataFilename, instrumentedPhase::grainSize, instrumentedPhase::idleTime, overheadContainer::max, idleTimeContainer::max, instrumentedPhase::memoryUsageMB, overheadContainer::min, idleTimeContainer::min, n, n2, instrumentedPhase::overheadTime, instrumentedData::phases, stats::time(), and instrumentedPhase::times.
Referenced by controlPointManager::controlPointManager().


| void controlPointManager::writeDataFile | ( | ) | [inherited] |
Add the current data to allData and output it to a file.
Definition at line 374 of file controlPoints.C.
References controlPointManager::allData, instrumentedData::cleanupNames(), CPDataFilename, endl(), instrumentedData::filterOutIncompletePhases(), shouldFilterOutputData, instrumentedData::toString(), and instrumentedData::verify().
| void controlPointManager::setCPCallback | ( | CkCallback | cb, | |
| bool | _frameworkShouldAdvancePhase | |||
| ) | [inherited] |
User can register a callback that is called when application should advance to next phase.
Definition at line 398 of file controlPoints.C.
References controlPointManager::controlPointChangeCallback, controlPointManager::frameworkShouldAdvancePhase, and controlPointManager::haveControlPointChangeCallback.
| void controlPointManager::setFrameworkAdvancePhase | ( | bool | _frameworkShouldAdvancePhase | ) | [inherited] |
A user can specify that the framework should advance the phases automatically. Useful for gather performance measurements without modifying a program.
Definition at line 406 of file controlPoints.C.
References controlPointManager::frameworkShouldAdvancePhase.
Referenced by FTN_NAME().

| void controlPointManager::processControlPoints | ( | ) | [inherited] |
Called periodically by the runtime to handle the control points Currently called on each PE.
Definition at line 412 of file controlPoints.C.
References controlPointManager::affectsPrioritiesEP, controlPointManager::allData, Converse::CkMyPe(), CkPriorityPtr(), CkSetQueueing(), CmiWallTimer(), controlPointManager::controlPointChangeCallback, instrumentedPhase::controlPoints, controlPointManager::controlPointSpace, instrumentedPhase::criticalPaths, controlPointManager::frameworkShouldAdvancePhase, PathHistory::getTotalTime(), controlPointManager::gotoNextPhase(), controlPointManager::haveControlPointChangeCallback, idle, instrumentedPhase::idleTime, int, idleTimeContainer::isValid(), idleTimeContainer::min, msg, controlPointManager::newControlPoints, p, instrumentedData::phases, idleTimeContainer::print(), controlPointManager::s, CkCallback::send(), instrumentedPhase::times, traceRegisterUserEvent(), and traceUserBracketEvent().
Determine if any control point is known to affect an entry method.
Definition at line 609 of file controlPoints.C.
References controlPointManager::affectsPrioritiesEP.
Determine if any control point is known to affect a chare array.
Definition at line 620 of file controlPoints.C.
References controlPointManager::affectsPrioritiesArray.
| instrumentedPhase * controlPointManager::currentPhaseData | ( | ) | [inherited] |
The data for the current phase.
The data from the current phase.
Definition at line 632 of file controlPoints.C.
References controlPointManager::allData, instrumentedData::phases, and controlPointManager::s.
Referenced by controlPointManager::setTiming().

| instrumentedPhase * controlPointManager::previousPhaseData | ( | ) | [inherited] |
The data from the previous phase.
Definition at line 640 of file controlPoints.C.
References controlPointManager::allData, controlPointManager::phase_id, instrumentedData::phases, and controlPointManager::s.
Referenced by controlPointManager::gatherAll(), controlPointManager::gatherIdleTime(), controlPointManager::gatherMemoryUsage(), and controlPointManager::generatePlan().
| instrumentedPhase * controlPointManager::twoAgoPhaseData | ( | ) | [inherited] |
The data from two phases back.
Definition at line 650 of file controlPoints.C.
References controlPointManager::allData, controlPointManager::phase_id, instrumentedData::phases, and controlPointManager::s.
Referenced by controlPointManager::generatePlan().

| void controlPointManager::gotoNextPhase | ( | ) | [inherited] |
Called by either the application or the Control Point Framework to advance to the next phase.
Definition at line 661 of file controlPoints.C.
References controlPointManager::allData, controlPointManager::alreadyRequestedAll, controlPointManager::alreadyRequestedIdleTime, controlPointManager::alreadyRequestedMemoryUsage, cb, Converse::CkMyPe(), LBDB::ClearLoads(), LDObjData::cpuTime, PUP::d, enableCPTracing, LBDatabase::getLBDB(), LBDB::getObjs(), LBDatabaseObj(), CkVec< T >::length(), LBObj::ObjData(), controlPointManager::phase_id, instrumentedData::phases, shouldGatherAll, shouldGatherMemoryUsage, shouldGatherUtilization, and LDObjData::wallTime.
Referenced by FTN_NAME(), and controlPointManager::processControlPoints().

| void controlPointManager::setTiming | ( | double | time | ) | [inherited] |
An application uses this to register an instrumented timing for this phase.
Definition at line 732 of file controlPoints.C.
References controlPointManager::currentPhaseData(), and instrumentedPhase::times.

| void controlPointManager::requestIdleTime | ( | CkCallback | cb | ) | [inherited] |
Entry method called on all PEs to request memory usage.
Entry method called on all PEs to request CPU utilization statistics.
Definition at line 753 of file controlPoints.C.
References enableCPTracing, idle, TraceControlPoints::idleRatio(), idleTimeReductionType, localControlPointTracingInstance(), and TraceControlPoints::resetTimings().

| void controlPointManager::gatherIdleTime | ( | CkReductionMsg * | msg | ) | [inherited] |
All processors reduce their memory usages in requestIdleTime() to this method.
Definition at line 770 of file controlPoints.C.
References controlPointManager::alreadyRequestedIdleTime, idleTimeContainer::avg, controlPointManager::checkForShutdown(), Converse::CkNumPes(), enableCPTracing, CkReductionMsg::getData(), CkReductionMsg::getSize(), instrumentedPhase::idleTime, idleTimeContainer::max, idleTimeContainer::min, controlPointManager::previousPhaseData(), idleTimeContainer::print(), r, and size.
| void controlPointManager::requestAll | ( | CkCallback | cb | ) | [inherited] |
Entry method called on all PEs to request Idle, Overhead, and Memory measurements.
Entry method called on all PEs to request CPU utilization statistics and memory usage.
Definition at line 799 of file controlPoints.C.
References allMeasuresReductionType, TraceControlPoints::b2, TraceControlPoints::b2mlen, TraceControlPoints::b3, TraceControlPoints::b3mlen, data, enableCPTracing, TraceControlPoints::grainSize(), idle, TraceControlPoints::idleRatio(), localControlPointTracingInstance(), PUP::m, TraceControlPoints::memoryUsageMB(), TraceControlPoints::overheadRatio(), TraceControlPoints::resetAll(), and PUP::t.
| void controlPointManager::gatherAll | ( | CkReductionMsg * | msg | ) | [inherited] |
All processors reduce their memory usages in requestIdleTime() to this method.
The average of the grain sizes on all PEs in us
Definition at line 838 of file controlPoints.C.
References controlPointManager::alreadyRequestedAll, overheadContainer::avg, idleTimeContainer::avg, instrumentedPhase::bytesPerInvoke, controlPointManager::checkForShutdown(), Converse::CkNumPes(), data, enableCPTracing, CkReductionMsg::getData(), CkReductionMsg::getSize(), instrumentedPhase::grainSize, idle, instrumentedPhase::idleTime, overheadContainer::max, idleTimeContainer::max, instrumentedPhase::memoryUsageMB, overheadContainer::min, idleTimeContainer::min, instrumentedPhase::overheadTime, controlPointManager::previousPhaseData(), and size.
| void controlPointManager::checkForShutdown | ( | ) | [inherited] |
Check to see if we are in the shutdown process, and handle it appropriately.
Definition at line 904 of file controlPoints.C.
References controlPointManager::alreadyRequestedAll, controlPointManager::alreadyRequestedIdleTime, controlPointManager::alreadyRequestedMemoryUsage, Converse::CkMyPe(), controlPointManager::doExitNow(), and controlPointManager::exitWhenReady.
Referenced by controlPointManager::gatherAll(), controlPointManager::gatherIdleTime(), and controlPointManager::gatherMemoryUsage().
| void controlPointManager::exitIfReady | ( | ) | [inherited] |
Start shutdown procedures for the controlPoints module(s).
CkContinueExit will be called once all outstanding operations have completed (e.g. waiting for idle time & memory usage to be gathered)
Definition at line 911 of file controlPoints.C.
References controlPointManager::alreadyRequestedAll, controlPointManager::alreadyRequestedIdleTime, controlPointManager::alreadyRequestedMemoryUsage, Converse::CkMyPe(), controlPointManager::doExitNow(), and controlPointManager::exitWhenReady.
| void controlPointManager::doExitNow | ( | ) | [inherited] |
All outstanding operations have completed, so do the shutdown now. First write files to disk, and then call CkExit().
Definition at line 923 of file controlPoints.C.
References _threadEP, CkContinueExit(), Converse::CkMyPe(), and controlPointManager::writeOutputToDisk().
Referenced by controlPointManager::checkForShutdown(), and controlPointManager::exitIfReady().

| void controlPointManager::writeOutputToDisk | ( | ) | [inherited] |
Write data to disk (when needed), likely at exit.
Definition at line 930 of file controlPoints.C.
References controlPointManagerProxy, and writeDataFileAtShutdown.
Referenced by controlPointManager::doExitNow().

| void controlPointManager::requestMemoryUsage | ( | CkCallback | cb | ) | [inherited] |
Entry method called on all PEs to request memory usage.
Definition at line 938 of file controlPoints.C.
References CmiMaxMemoryUsage(), CmiResetMaxMemory(), PUP::m, and CkReduction::max_int.

| void controlPointManager::gatherMemoryUsage | ( | CkReductionMsg * | msg | ) | [inherited] |
All processors reduce their memory usages to this method.
Definition at line 946 of file controlPoints.C.
References controlPointManager::alreadyRequestedMemoryUsage, controlPointManager::checkForShutdown(), Converse::CkMyPe(), CkReductionMsg::getData(), CkReductionMsg::getSize(), int, PUP::m, instrumentedPhase::memoryUsageMB, controlPointManager::previousPhaseData(), and size.
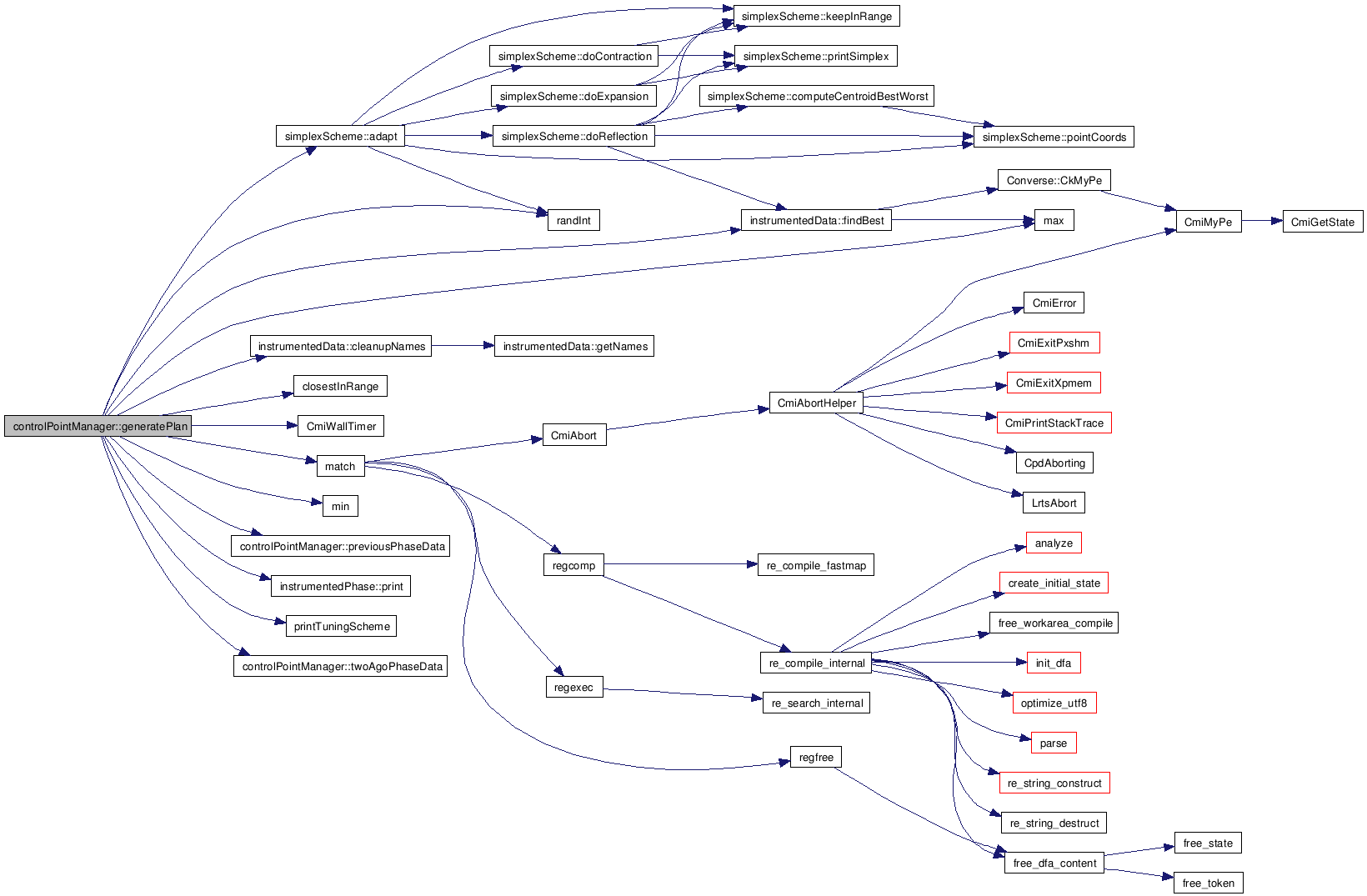
| void controlPointManager::generatePlan | ( | ) | [inherited] |
Generate a plan (new control point values) once per phase.
Determine a control point value using some optimization scheme (use max known, simmulated annealling, user observed characteristic to adapt specific control point values.
This function must return valid values for newControlPoints.
Definition at line 1262 of file controlPoints.C.
References PUP::a, simplexScheme::adapt(), controlPointManager::allData, overheadContainer::avg, idleTimeContainer::avg, PUP::b, c, instrumentedData::cleanupNames(), closestInRange(), CmiWallTimer(), config, instrumentedPhase::controlPoints, controlPointManager::controlPointSpace, CriticalPathAutoPrioritization, PUP::d, direction, DivideAndConquer, ControlPoint::EFF_DEC, ControlPoint::EFF_INC, ExhaustiveSearch, instrumentedData::findBest(), controlPointManager::generatedPlanForStep, high, instrumentedPhase::idleTime, info, int, lb, LDBPeriod, LDBPeriodLinear, LDBPeriodOptimal, LDBPeriodQuadratic, PUP::m, match(), max(), MemoryAware, instrumentedPhase::memoryUsageMB, min(), name, controlPointManager::newControlPoints, instrumentedPhase::overheadTime, controlPointManager::phase_id, instrumentedData::phases, controlPointManager::previousPhaseData(), instrumentedPhase::print(), printTuningScheme(), randInt(), RandomSelection, controlPointManager::s, Simplex, SimulatedAnnealing, instrumentedPhase::times, controlPointManager::twoAgoPhaseData(), ub, UseBestKnownTiming, UseSteering, and whichTuningScheme.
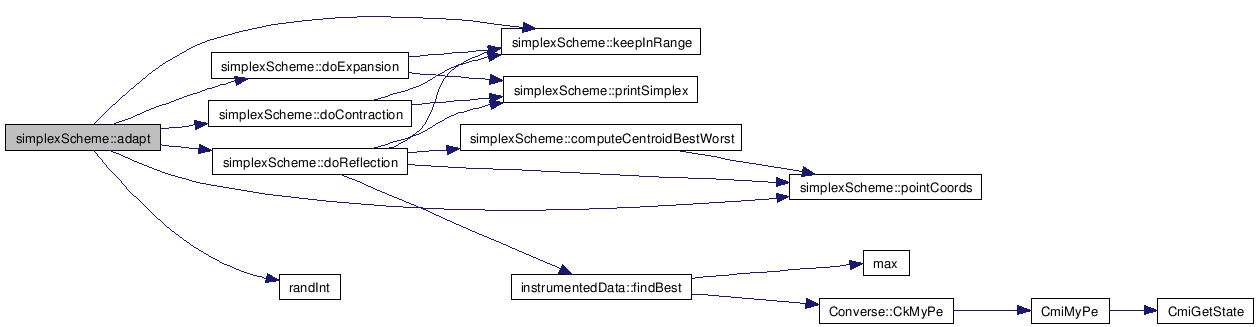
| void simplexScheme::adapt | ( | std::map< std::string, std::pair< int, int > > & | controlPointSpace, | |
| std::map< std::string, int > & | newControlPoints, | |||
| const int | phase_id, | |||
| instrumentedData & | allData | |||
| ) | [inherited] |
Inform the control point framework that a named control point affects the priorities of some array.
Determine the next configuration to try using the Nelder Mead Simplex Algorithm.
This function decomposes the algorithm into a state machine that allows it to evaluate one or more configurations through subsequent clls to this function. The state diagram is pictured in the NelderMeadStateDiagram.pdf diagram.
At one point in the algorithm, n+1 parameter configurations must be evaluated, so a list of them will be created and they will be evaluated, one per call.
Currently there is no stopping criteria, but the simplex ought to contract down to a few close configurations, and hence not much change will happen after this point.
Definition at line 2269 of file controlPoints.C.
References simplexScheme::beginning, simplexScheme::best, simplexScheme::bestTime, c, simplexScheme::contracting, simplexScheme::doContraction(), simplexScheme::doExpansion(), simplexScheme::doneExpanding, simplexScheme::doReflection(), simplexScheme::expanding, simplexScheme::firstSimplexPhase, simplexScheme::keepInRange(), lb, n, name, simplexScheme::P, simplexScheme::p2Phase, instrumentedData::phases, simplexScheme::pointCoords(), simplexScheme::pPhase, randInt(), simplexScheme::reflecting, simplexScheme::simplexIndices, simplexScheme::simplexState, simplexScheme::stillContracting, simplexScheme::stillMustContractList, PUP::t, ub, simplexScheme::useBestKnown, simplexScheme::worst, simplexScheme::worstPhase, and simplexScheme::worstTime.
Referenced by controlPointManager::generatePlan().

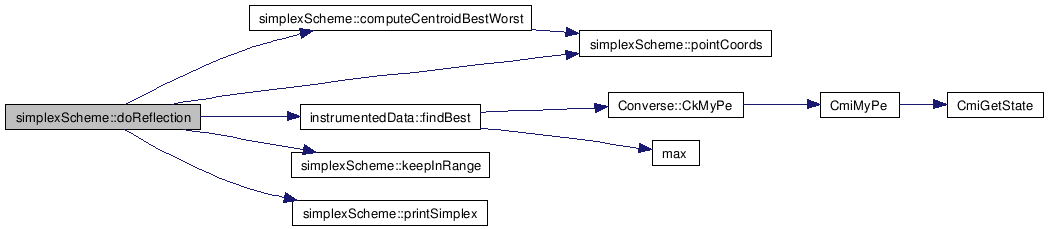
| void simplexScheme::doReflection | ( | std::map< std::string, std::pair< int, int > > & | controlPointSpace, | |
| std::map< std::string, int > & | newControlPoints, | |||
| const int | phase_id, | |||
| instrumentedData & | allData | |||
| ) | [private, inherited] |
Replace the worst point with its reflection across the centroid.
Definition at line 2491 of file controlPoints.C.
References simplexScheme::alpha, simplexScheme::best, simplexScheme::centroid, simplexScheme::computeCentroidBestWorst(), instrumentedPhase::controlPoints, PUP::d, instrumentedData::findBest(), simplexScheme::keepInRange(), lb, n, name, simplexScheme::P, p, instrumentedData::phases, simplexScheme::pointCoords(), simplexScheme::pPhase, simplexScheme::printSimplex(), simplexScheme::reflecting, simplexScheme::simplexState, ub, simplexScheme::useBestKnown, simplexScheme::worst, and simplexScheme::worstPhase.
Referenced by simplexScheme::adapt().

| void simplexScheme::doExpansion | ( | std::map< std::string, std::pair< int, int > > & | controlPointSpace, | |
| std::map< std::string, int > & | newControlPoints, | |||
| const int | phase_id, | |||
| instrumentedData & | allData | |||
| ) | [private, inherited] |
Replace the newly tested reflection with a further expanded version of itself.
Definition at line 2565 of file controlPoints.C.
References simplexScheme::centroid, simplexScheme::doneExpanding, simplexScheme::gamma, simplexScheme::keepInRange(), lb, n, name, simplexScheme::P, simplexScheme::P2, simplexScheme::p2Phase, instrumentedData::phases, simplexScheme::printSimplex(), simplexScheme::simplexState, ub, and simplexScheme::worstPhase.
Referenced by simplexScheme::adapt().


| void simplexScheme::doContraction | ( | std::map< std::string, std::pair< int, int > > & | controlPointSpace, | |
| std::map< std::string, int > & | newControlPoints, | |||
| const int | phase_id, | |||
| instrumentedData & | allData | |||
| ) | [private, inherited] |
Replace the newly tested reflection with a further expanded version of itself.
Definition at line 2609 of file controlPoints.C.
References simplexScheme::beta, simplexScheme::centroid, simplexScheme::contracting, simplexScheme::keepInRange(), lb, n, name, simplexScheme::P, simplexScheme::P2, simplexScheme::p2Phase, instrumentedData::phases, simplexScheme::printSimplex(), simplexScheme::simplexState, ub, simplexScheme::worst, and simplexScheme::worstPhase.
Referenced by simplexScheme::adapt().


| void simplexScheme::computeCentroidBestWorst | ( | std::map< std::string, std::pair< int, int > > & | controlPointSpace, | |
| std::map< std::string, int > & | newControlPoints, | |||
| const int | phase_id, | |||
| instrumentedData & | allData | |||
| ) | [private, inherited] |
Definition at line 2649 of file controlPoints.C.
References simplexScheme::best, simplexScheme::bestPhase, simplexScheme::bestTime, c, simplexScheme::centroid, n, instrumentedData::phases, simplexScheme::pointCoords(), simplexScheme::simplexIndices, PUP::t, simplexScheme::worst, simplexScheme::worstPhase, and simplexScheme::worstTime.
Referenced by simplexScheme::doReflection().


| std::vector< double > simplexScheme::pointCoords | ( | instrumentedData & | allData, | |
| int | i | |||
| ) | [private, inherited] |
Definition at line 2713 of file controlPoints.C.
References instrumentedData::phases.
Referenced by simplexScheme::adapt(), simplexScheme::computeCentroidBestWorst(), and simplexScheme::doReflection().

Definition at line 18 of file trace-controlPoints.C.
| CProxy_controlPointManager controlPointManagerProxy |
Definition at line 46 of file controlPoints.C.
Referenced by controlPoint(), controlPointMain::controlPointMain(), controlPointShutdown(), controlPointTimingStamp(), ControlPointWriteOutputToDisk(), gotoNextPhase(), periodicProcessControlPoints(), registerControlPointTiming(), registerCPChangeCallback(), setFrameworkAdvancePhase(), and controlPointManager::writeOutputToDisk().
Definition at line 47 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and randInt().
Definition at line 48 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), controlPointManager::controlPointManager(), and periodicProcessControlPoints().
Definition at line 49 of file controlPoints.C.
Referenced by controlPoint(), controlPointMain::controlPointMain(), controlPointManager::generatePlan(), and printTuningScheme().
Definition at line 50 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::writeOutputToDisk().
Definition at line 51 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::writeDataFile().
Definition at line 52 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::controlPointManager().
Definition at line 53 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::gotoNextPhase().
Definition at line 54 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::gotoNextPhase().
Definition at line 55 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::gotoNextPhase().
| char CPDataFilename[512] |
Definition at line 56 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), controlPointManager::loadDataFile(), and controlPointManager::writeDataFile().
| std::map<std::string, int> defaultControlPointValues |
The control point values to be used for the first few phases if the strategy doesn't choose to do something else.
These probably come from the command line arguments, so are available only on PE 0
Definition at line 62 of file controlPoints.C.
Referenced by controlPoint(), and controlPointMain::controlPointMain().
A reduction type that combines idle time measurements (min/sum/max etc.).
Definition at line 124 of file controlPoints.C.
Referenced by registerCPReductions(), and controlPointManager::requestIdleTime().
A reduction type that combines idle, overhead, and memory measurements.
Definition at line 148 of file controlPoints.C.
Referenced by registerCPReductions(), and controlPointManager::requestAll().
| CProxy_controlPointManager controlPointManagerProxy |
Definition at line 46 of file controlPoints.C.
Referenced by controlPoint(), controlPointMain::controlPointMain(), controlPointShutdown(), controlPointTimingStamp(), ControlPointWriteOutputToDisk(), gotoNextPhase(), periodicProcessControlPoints(), registerControlPointTiming(), registerCPChangeCallback(), setFrameworkAdvancePhase(), and controlPointManager::writeOutputToDisk().
Definition at line 47 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and randInt().
Definition at line 48 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), controlPointManager::controlPointManager(), and periodicProcessControlPoints().
Definition at line 49 of file controlPoints.C.
Referenced by controlPoint(), controlPointMain::controlPointMain(), controlPointManager::generatePlan(), and printTuningScheme().
Definition at line 50 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::writeOutputToDisk().
Definition at line 51 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::writeDataFile().
Definition at line 52 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), and controlPointManager::controlPointManager().
| char CPDataFilename[512] |
Definition at line 56 of file controlPoints.C.
Referenced by controlPointMain::controlPointMain(), controlPointManager::loadDataFile(), and controlPointManager::writeDataFile().
| FLINKAGE int CMK_TYPEDEF_INT4* ub |
Definition at line 93 of file controlPoints.h.
Referenced by simplexScheme::adapt(), ADIOI_BGL_Calc_aggregator(), CkDDT_DataType::CkDDT_DataType(), CkDDT_HIndexed::CkDDT_HIndexed(), CkDDT_HIndexed_Block::CkDDT_HIndexed_Block(), CkDDT_Vector::CkDDT_Vector(), DLOOP_Type_calc_footprint_struct(), simplexScheme::doContraction(), simplexScheme::doExpansion(), simplexScheme::doReflection(), FTN_NAME(), controlPointManager::generatePlan(), PREPEND_PREFIX(), CkDDT_DataType::pupType(), CkDDT_DataType::setSize(), and Type_calc_footprint().
 1.5.5
1.5.5