
Go to the source code of this file.
Data Structures | |
| class | Skipped_Event |
| Class for storing data of events skipped while checkpointing (for sequential simulation). More... | |
| class | callBack |
| Class for user-specified callback. More... | |
| class | pose |
| Coordinator of simulation initialization, start and termination. More... | |
Functions | |
| void | POSE_init () |
| Main initialization for all of POSE. | |
| void | POSE_init (int ET) |
| void | POSE_init (int IDflag, int ET) |
| void | POSE_startTimer () |
| Start POSE simulation timer. | |
| void | POSE_useID () |
| Use Inactivity Detection to terminate program. | |
| void | POSE_useET (POSE_TimeType et) |
| Use a user-specified end time to terminate program. | |
| void | POSE_registerCallBack (CkCallback cb) |
| Specify an optional callback to be called when simulation terminates. | |
| void | POSE_stop () |
| Stop POSE simulation. | |
| void | POSE_prepExit (void *param, void *msg) |
| Exit simulation program after terminus reduction. | |
| void | POSE_exit () |
| Exit simulation program. | |
| void | setPoseIndexOfStopEvent (int index) |
| Set the poser index for an event to be executed when POSE detects quiescence. | |
| void | POSE_set_busy_wait (double n) |
| Set busy wait time. | |
| void | POSE_busy_wait () |
| Busy wait for busyWait. | |
| void | POSE_busy_wait (double n) |
| Busy wait for n. | |
| CpvExtern (int, stateRecovery) | |
| Flag to indicate how foward execution should proceed. | |
Variables | |
| int | _POSE_SEQUENTIAL |
| Whether or not pose is in sequential mode. | |
| int | totalNumPosers |
| Number of posers in the poser array (POSE_Objects). | |
| double | busyWait |
| User specified busy wait time (for grainsize testing). | |
| double | sim_timer |
| Simulation start time. | |
| POSE_TimeType | POSE_endtime |
| Simulation end time. | |
| int | POSE_inactDetect |
| Inactivity detection flag. | |
| POSE_TimeType | POSE_GlobalClock |
| Global clock (for sequential simulation). | |
| POSE_TimeType | POSE_GlobalTS |
| int | seqCheckpointInProgress |
| Checkpointing (for sequential simulation). | |
| POSE_TimeType | seqLastCheckpointGVT |
| double | seqLastCheckpointTime |
| double | seqStartTime |
| CkQ< Skipped_Event > | POSE_Skipped_Events |
| int | poseIndexOfStopEvent |
| The index of a poser that has an event that should be executed at simulation end (for sequential simulation). | |
| POSE_Config | pose_config |
| void POSE_init | ( | ) |
Main initialization for all of POSE.
Definition at line 39 of file pose.C.
References POSE_init(), and POSE_UnsetTS.
Referenced by POSE_init().


| void POSE_init | ( | int | ET | ) |
Definition at line 44 of file pose.C.
References POSE_init().
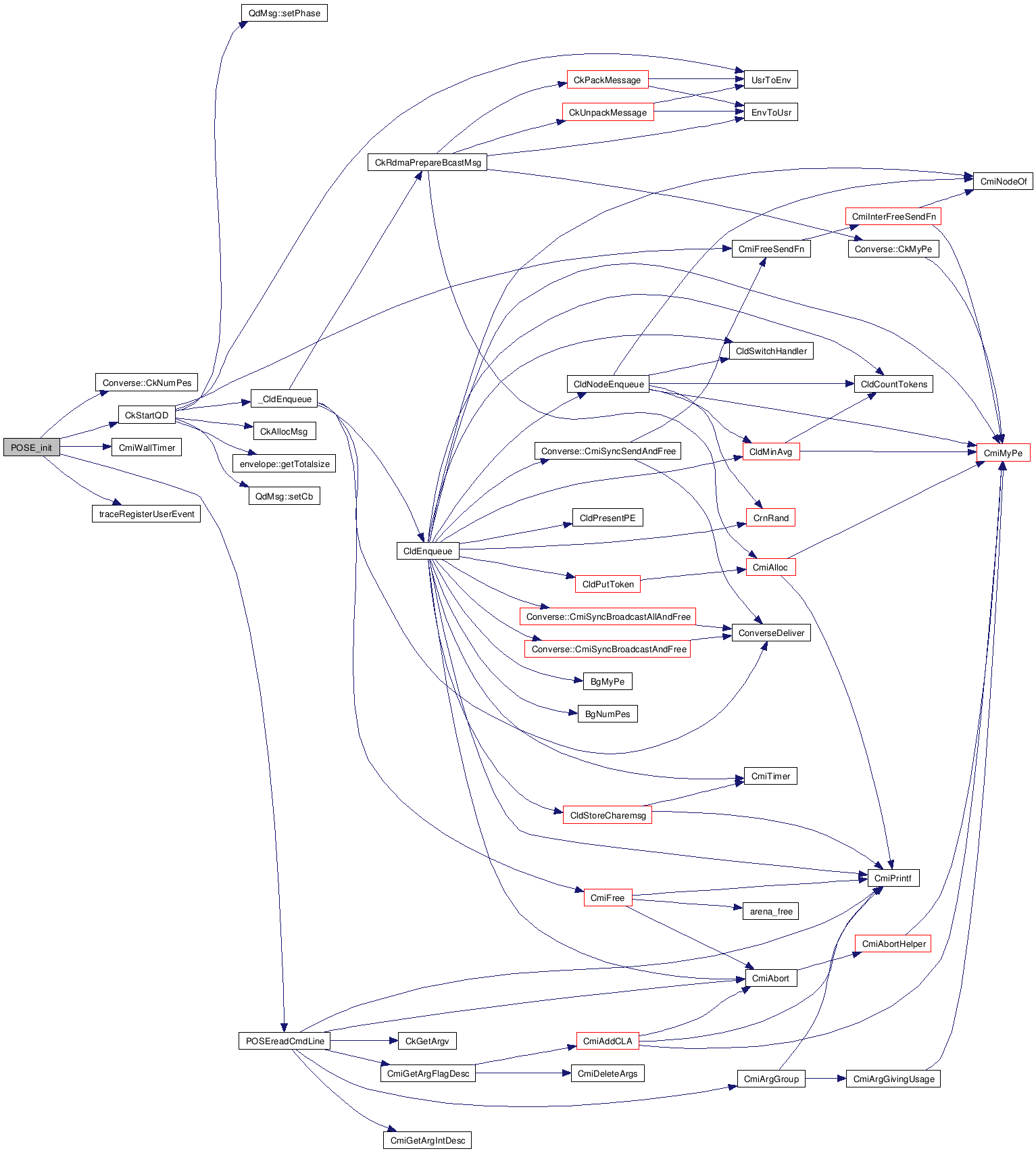
Definition at line 49 of file pose.C.
References _POSE_SEQUENTIAL, POSE_Config::checkpoint_gvt_interval, POSE_Config::checkpoint_time_interval, Converse::CkNumPes(), CkStartQD(), CmiWallTimer(), POSE_Config::dop, fName, POSE_Config::lb_on, MemPoolID, POSE_Coordinator_ID, POSE_endtime, POSE_GlobalClock, POSE_GlobalTS, POSE_inactDetect, POSE_Objects, poseIndexOfStopEvent, POSEreadCmdLine(), seqCheckpointInProgress, seqLastCheckpointGVT, seqLastCheckpointTime, seqStartTime, sim_timer, TempMemID, theGlobalStats, TheGVT, TheLBG, TheLBstrategy, theLocalStats, ThePVT, totalNumPosers, and traceRegisterUserEvent().
| void POSE_startTimer | ( | ) |
Start POSE simulation timer.
Definition at line 143 of file pose.C.
References CmiWallTimer(), and sim_timer.

| void POSE_useID | ( | ) |
| void POSE_useET | ( | POSE_TimeType | et | ) |
| void POSE_registerCallBack | ( | CkCallback | cb | ) |
Specify an optional callback to be called when simulation terminates.
Definition at line 161 of file pose.C.
References callBack::callback, and POSE_Coordinator_ID.
| void POSE_stop | ( | ) |
Stop POSE simulation.
Stops timer so statistics collection, callback, final output, etc. are not counted in simulation time.
Definition at line 170 of file pose.C.
References POSE_Coordinator_ID.
Referenced by GVT::computeGVT().

| void POSE_prepExit | ( | void * | param, | |
| void * | msg | |||
| ) |
| void setPoseIndexOfStopEvent | ( | int | index | ) |
Set the poser index for an event to be executed when POSE detects quiescence.
Definition at line 184 of file pose.C.
References poseIndexOfStopEvent.
| void POSE_set_busy_wait | ( | double | n | ) |
| void POSE_busy_wait | ( | ) |
Busy wait for busyWait.
Definition at line 217 of file pose.C.
References busyWait, and CmiWallTimer().

| void POSE_busy_wait | ( | double | n | ) |
Busy wait for n.
Definition at line 224 of file pose.C.
References CmiWallTimer().

| CpvExtern | ( | int | , | |
| stateRecovery | ||||
| ) |
Flag to indicate how foward execution should proceed.
0 for normal forward execution; 1 for state recovery only
Whether or not pose is in sequential mode.
Definition at line 22 of file pose.C.
Referenced by POSE_init().
Number of posers in the poser array (POSE_Objects).
Definition at line 17 of file pose.C.
Referenced by POSE_init(), and pvtObjects::StratCalcs().
| double busyWait |
User specified busy wait time (for grainsize testing).
Definition at line 14 of file pose.C.
Referenced by POSE_busy_wait(), and POSE_set_busy_wait().
| double sim_timer |
Simulation start time.
Definition at line 15 of file pose.C.
Referenced by POSE_init(), POSE_startTimer(), and pose::prepExit().
Simulation end time.
Definition at line 18 of file pose.C.
Referenced by sim::Commit(), eventQueue::CommitEvents(), GVT::computeGVT(), POSE_init(), spec::Step(), opt3::Step(), opt2::Step(), adapt5::Step(), adapt4::Step(), adapt3::Step(), adapt2::Step(), and adapt::Step().
Global clock (for sequential simulation).
Definition at line 19 of file pose.C.
Referenced by POSE_init(), sim::SeqResumeAfterCheckpoint(), seq::Step(), and pose::stop().
Checkpointing (for sequential simulation).
Definition at line 23 of file pose.C.
Referenced by POSE_init(), sim::pup(), sim::SeqBeginCheckpoint(), sim::SeqResumeAfterCheckpoint(), seq::Step(), and pose::stop().
Definition at line 24 of file pose.C.
Referenced by POSE_init(), sim::pup(), sim::SeqBeginCheckpoint(), sim::SeqResumeAfterCheckpoint(), and seq::Step().
| double seqLastCheckpointTime |
| double seqStartTime |
Definition at line 26 of file pose.C.
Referenced by POSE_init(), sim::pup(), sim::SeqBeginCheckpoint(), sim::SeqResumeAfterCheckpoint(), and seq::Step().
Definition at line 27 of file pose.C.
Referenced by sim::pup(), sim::SeqResumeAfterCheckpoint(), and seq::Step().
The index of a poser that has an event that should be executed at simulation end (for sequential simulation).
Definition at line 28 of file pose.C.
Referenced by POSE_init(), sim::pup(), setPoseIndexOfStopEvent(), and pose::stop().
 1.5.5
1.5.5